
Принцип работы гиперспектральных камер

Гиперспектральные камеры, используемые в промышленных условиях или на борту воздушных платформ (самолетов), часто работают по принципу сканера щеточного типа. Эти сканеры, как и Specim, построены по одному и тому же принципу:
- Передняя линза, чтобы определить поле зрения (FOV);
- Входная щель, чтобы датчик сразу видел только тонкую линию цели;
- Дисперсионная оптика, так что тонкий пучок излучения, попадающий в систему, распространяется по последнему основному компоненту;
- Матричный детектор.
При такой конфигурации сразу виден не весь образец или сцена целиком, а только тонкая линия. Движение необходимо для изображения всего объекта, обеспечиваемого, например, конвейерной лентой. Однако пользователю может быть интересно, какую часть образца, сцены или цели видит датчик.
Эффективность измерений, зависит от нескольких параметров:
- Частота кадров камеры;
- Скорость движения;
- Время интегрирования;
- Ширина щели камеры;
- Передний объектив;
- Расстояние измерения.
Чтобы полностью понять это, можно рассмотреть рисунок 1: гиперспектральная камера Specim FX17, размещенная на конвейерной ленте шириной 1 м, сортирует пластиковые частицы со скоростью 2 м/с.
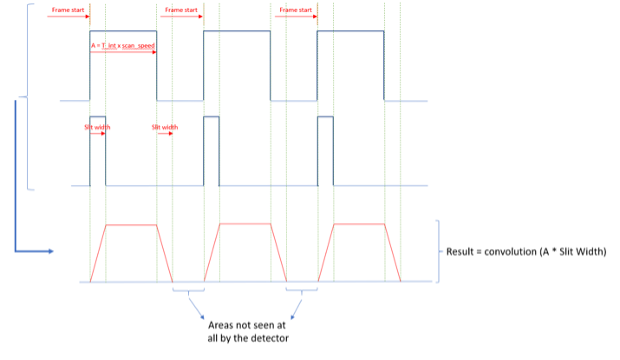
Рисунок 1 – Свертка сигнала
В качестве первого шага предположим, что пользователь хочет сохранить правильное соотношение сторон, то есть круглый объект отображается как круглый. Поскольку FX17 измеряет спектры более 640 пикселей на линию визирования, размер пикселя по ленте составляет 1000/640 = 1.56 мм. Частота кадров камеры должна быть установлена на 1282 кадра в секунду, чтобы получить «квадратные» пиксели. Это выполнимо с FX17 за счет уменьшения количества спектральных полос, например, путем измерения спектров только по 112 полосам (для полного диапазона 900 - 1700 нм потребуется 224 полосы).
При настройке камеры на 1282 кадра в секунду новая строка (кадр) создается каждые 0.78 мс. За это время лента сместилась на 1.56 мм, что имеет смысл, поскольку пользователь хочет сохранить соотношение сторон. Однако, что здесь имеет наибольшее значение, так это расстояние, пройденное лентой, в то время как камера эффективно собирает данные во время интеграции. Максимально возможное время интегрирования для работы со скоростью 1282 кадров в секунду составляет около 0.5 мс. Это означает, что за это время лента будет фиксировать данные более 1 мм. Так, на рисунке выше А = 1 мм.
Со стандартной 38-градусной передней оптикой FX17 нужно было бы разместить на расстоянии 1.45 м от ленты, с этого расстояния ширина видимой камерой линии составляет 3.48 мм.
На рисунке 2 представлена конфигурация, где изображение ширины щели намного больше, чем на рисунке 1:
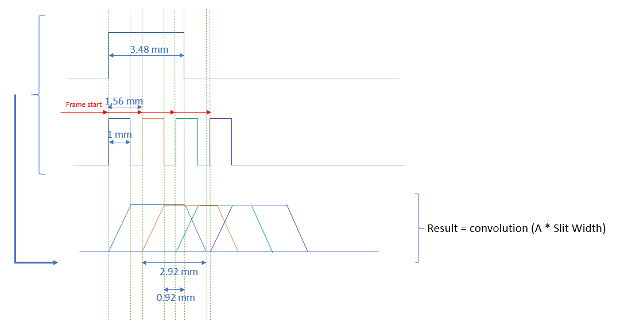
Рисунок 2 – Свертка при увеличенной ширине щели
Как видно, из-за большей щели два последовательных кадра накладываются друг на друга. Даже если получить кадр с вдвое меньшим темпом (в этом случае 641 кадр/с), соотношение сторон больше не будет сохраняться (круглый объект будет отображаться как овал). Тем не менее, по-прежнему получается полностью отображаемый образец.
Глядя на ширину изображения щели, свернутую с расстоянием, пройденным лентой за время интегрирования, расстояние между каждым кадром, пройденным лентой, может составлять до 4.48 мм, что приводит к частоте 446 кадров в секунду для полностью отображаемого образца. Если частота кадров уменьшится, два последовательных кадра больше не будут перекрываться, и часть выборки не будет захвачена.
