
Особенности конструкции 6-осевой платформы NanoMax
Для сложного, многоосевого позиционирования, платформы с параллельным изгибом, которые объединяют три или более степеней свободы в один компактный блок, обеспечивают значительно более высокую производительность по сравнению с составными платформами. Запатентованная компанией Thorlabs технология параллельного изгиба лежит в основе семейства платформ нанопозиционирования NanoMax™. Отправной точкой концептуальной конструкции является наблюдение, что движение твердого тела имеет шесть уникальных степеней свободы. Каждый исполнительный механизм должен отнимать одну степень свободы у корпуса, так что корпус полностью ограничен шестью исполнительными механизмами.
Упрощенная схема параллельного изгиба
Конструкция с параллельным изгибом подвижной платформы обеспечивает непревзойденное сочетание высокой стабильности и разрешения в шестиосевой платформе нанопозиционирования. Механическая жесткость на порядок выше, чем у традиционных составных конструкций. В дополнение к уже упомянутым, есть несколько других существенных преимуществ конструкции с параллельным изгибом: гораздо меньшая рабочая высота по сравнению с составными платформами, дополнительное сопротивление внешним силам и значительное улучшение демпфирующих возможностей. Кроме того, поскольку движущихся частей меньше, уменьшается инерция движущейся платформы. Это приводит к отличным динамическим характеристикам, что делает этот продукт идеальным для быстрой автоматической центровки. Такая конструкция также решает проблему накопления ошибок, обычно наблюдаемую в составных проектах.
Важно отметить, что параллельные изгибы, как и последовательные изгибы, демонстрируют перекрестные помехи или дугообразное движение. Когда платформа перемещается в любую сторону от ее центрального положения, возникают поперечные дугообразные смещения примерно 20 мкм на миллиметр хода. Если одновременно перемещать несколько осей, комбинированный эффект может быть больше; однако, в отличие от случайных ошибок позиционирования, обнаруживаемых на традиционных платформаах, эти перекрестные помехи очень предсказуемы и, следовательно, могут быть исправлены с помощью небольших корректировок. Хотя дугообразные смещения иногда вызывают беспокойство, они редко препятствуют выравниванию волокон или других оптических компонентов, поскольку оптические лучи редко распространяются коллинеарно с осями любой платформы, превышая масштаб дугообразного движения. Кроме того, при использовании контроллера автоматического выравнивания NanoTrak™ эти эффекты автоматически компенсируются самим контроллером. Однако, если дугообразное движение является ограничивающим параметром конкретного приложения для выравнивания или позиционирования, его эффекты также можно компенсировать с помощью программного обеспечения.
Традиционные, составные (последовательные) многоосные платформы
Многоосные системы традиционно строятся путем объединения ряда одноосных механизмов. По мере увеличения числа осей конструкция становится сложнее и больше. Кроме того, составление приводов снижает жесткость и может привести к множеству ошибок позиционирования.
Упрощенная схема составного (последовательного) изгиба
Все традиционные конструкции многоосных платформ (например, роликовые подшипники, шарикоподшипники или изгибы) страдают от накопления ошибок при наложении платформ друг на друга. При простом составлении двух платформ необходимо учитывать две основные ошибки: косинуса и Аббе. Ошибка косинуса возникает, когда оси двух платформ не выровнены ортогонально друг другу. Ошибка Аббе возникает из-за конечной высоты верхней платформы. Любые угловые ошибки крена, тангажа или рыскания на нижней платформе будут увеличиваться на общую высоту составной системы. Ситуация особенно заметна для шестиосевой платформы, где механизм, обеспечивающий шестую степень свободы, расположен поверх пяти других платформ. Все ошибки на предыдущих платформаах в совокупности делают общую объемную точность всего блока намного хуже, чем ошибки, связанные с любой отдельной платформой.
Конструкция параллельной платформы решает проблему накопления ошибок. Идея конструкции заключалась в том, чтобы представить изгиб как жесткий стержень с гибкой муфтой на каждом конце, обеспечивающей ровно две степени свободы вращения. Такая стержневая конструкция ограничивает движение верхней пластины, соединяя ее с основанием. Шесть таких стержней обеспечивают шесть независимых ограничений, необходимых для сдерживания платформы, ни чрезмерного, ни недостаточного ограничения.
Чтобы вызвать движение в верхней пластине, концы изгибаемых стержней, не прикрепленные к верхней пластине, соединяются с линейными приводами. Линейное поступательное движение происходит за счет перемещения соответствующих пар стержней изгиба в одном направлении, тогда как вращение происходит путем перемещения соответствующих пар стержней в противоположных направлениях.
Уменьшение количества деталей, низкие затраты на обслуживание и длительный срок службы
Было показано, что для точной передачи движения предпочтительно иметь как можно меньше движущихся частей, действующих последовательно. На каждой границе между частями могут существовать микроскопические дефекты, которые создают трение. Такое трение бывает непредсказуемым и неконтролируемым, что делает его наиболее нежелательным элементом любой высокопроизводительной конструкции. Платформы с параллельным изгибом имеют очень мало движущихся частей и могут очень точно передавать движение. Испытания, проведенные для размеров более 30 мкм с шагом 1 мкм, показали среднеквадратичную двунаправленную повторяемость 30 нм, или 0.1% от полного диапазона для 6-осевых платформ NanoMax. Эти результаты стали возможными благодаря превосходным характеристикам механизма параллельного изгиба, который устраняет статическое и кинематическое трение внутри платформы.
Во время работы 6-осевые платформы NanoMax не подвержены значительному износу благодаря минимальному количеству движущихся частей. Поскольку в движущихся частях нет подшипников, качество позиционирования со временем не ухудшается. Это также снижает затраты на техническое обслуживание, поскольку единственные детали, которые могут потребовать обслуживания – это механизмы привода. Более того, не нужно полностью нарушать настройки для обслуживания платформы. Приводы можно очень легко и быстро поменять местами, что сводит к минимуму время простоя системы. Однако, когда привод будет удален, платформа сместится.
Общая точка для всех осей вращения
Уникальной механической особенностью платформ NanoMax с 6 степенями свободы является добавление одной общей точки вращения, для всех трех осей (θx, θy, θz), чтобы упростить любую задачу выравнивания. На практике это означает, что необходимость компенсации бокового движения практически устраняется при регулировке вращения любой оси. Для сложной юстировки планарных оптических устройств это может значительно сократить время, необходимое для оптимизации системы.
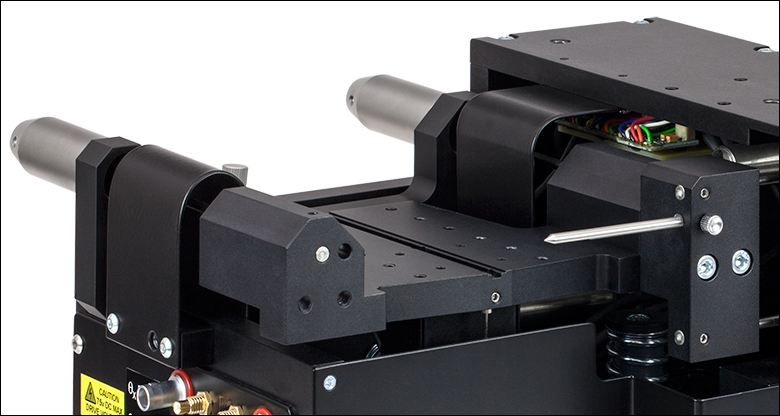
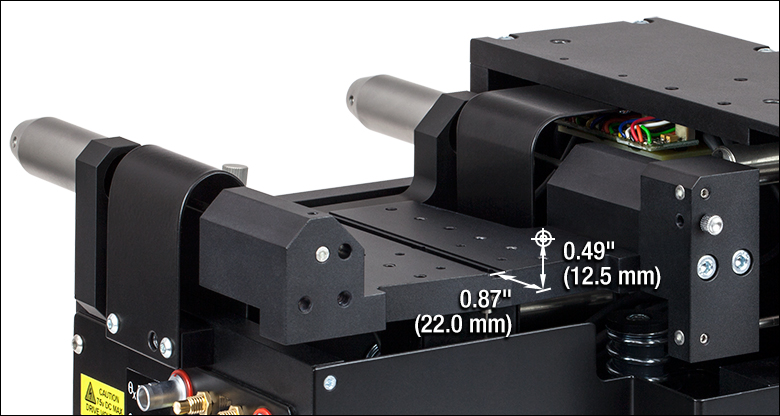
Наконечник съемного штыря из нержавеющей стали отмечает общую точку поворота столика для всех осей вращения
Обычно держатель волокна прикрепляется так, чтобы конец волокна удерживался в общей точке вращения, а все прикрепленные регуляторы находились в середине диапазона их перемещения. Если движущаяся платформа перемещается от ее средней точки, точка поворота также перемещается относительно основания, сохраняя свое положение относительно движущейся платформы. После того, как элементы выровнены на платформе, штырь из нержавеющей стали можно снять, ослабив ручку на передней панели устройства.
Съем штыря из нержавеющей стали ослаблением ручки с накаткой на передней части предметного столика
Фиксированные, модульные приводы с высоким разрешением
Все приводы подключаются непосредственно к основанию системы, а не к подвижной верхней пластине, что сводит к минимуму нежелательное движение внутри системы. Следовательно, во время ручного управления это позволяет операторам достигать более высокого разрешения с меньшими усилиями. В моторизованных и автоматизированных приложениях вибрация и удары привода мало влияют на подвижную верхнюю пластину.
Модульная конструкция 6-осевых платформ NanoMax позволяет снимать и заменять приводы в любое время. Это позволяет смешивать и согласовывать настройки приводов в зависимости от степени автоматизации или разрешения, необходимого для каждой оси.
Thorlabs предлагает ряд вариантов приводов, включая винты с накатанной головкой с мелкой резьбой, дифференциальные микрометры, моторизованные приводы и пьезоудлинители. Модульность делает платформу универсальной для всех приложений. Также доступны версии, которые имеют внутренние пьезоэлектрические приводы, обеспечивающие ход 30 мкм с разрешением до 1.0 нм, либо с разомкнутым контуром, либо с обратной связью по положению тензодатчика (замкнутый контур). Для повышения производительности и стабильности напряжения привода также контролируются встроенной схемой для компенсации тепловых колебаний.
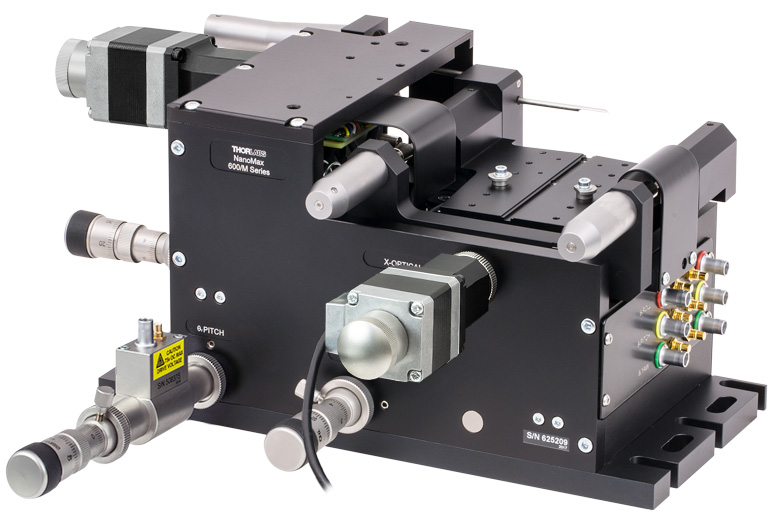
6-осевая платформа с различными приводами
Малая высота платформы и выравнивание аксессуаров в шпоночном пазе
Платформы Thorlabs с 6 степенями свободы имеют небольшую высоту 112.5 мм (4.43 дюйма) для повышения устойчивости. Эта высота также делает платформу совместимой с 5-осевыми наборами платформ высотой 112.5 мм. Доступны адаптеры для увеличения высоты платы высотой 62.5 мм 3-осевых и 4-осевых платформ до 112.5 мм, что обеспечивает совместимость с 6-осевыми платформами.
Центральный шпоночный паз на верхней плате позволяет быстро реконфигурировать систему при сохранении выравнивания аксессуаров. Доступен широкий спектр аксессуаров для крепления таких предметов, как объективы микроскопов, коллимационные блоки, волноводы, оптоволокно и многих других.
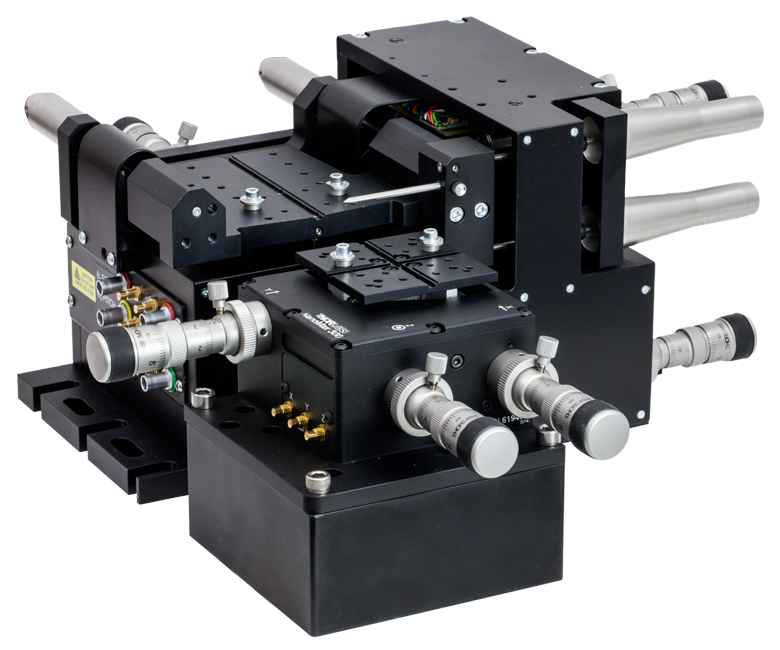
3-осевая платформа MicroBlock Compact с изгибом выровнена перед 6-осевой платформой на высоте платы 112.5 мм с помощью адаптера
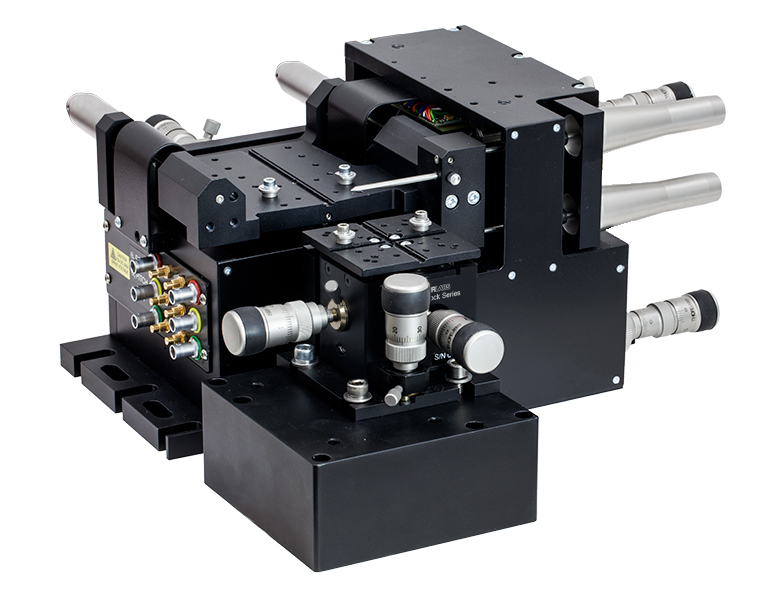
3-осевая платформа NanoMax Flexure выровнена перед 6-осевым столиком на высоте платы 112.5 мм с помощью адаптера
