
Выбор пьезоэлементов: принцип работы и свойства

Устройства на основе цирконат-титаната свинца (ЦТС) способны осуществлять управление механическими компонентами с высокой точностью, такими как держатели зеркал или трансляторы. ЦТС способны производить малые смещения с большими усилием, предельной нагрузкой и жесткостью. Эти характеристики позволяют пьезоэлектрическим устройствам выдерживать относительно большие нагрузки при небольших, но точных смещениях. Чтобы понять как интегрировать пьезоэлектрические компоненты в вашу систему или определить, какие пьезоэлектрические элементы подходят для ваших задач, рассмотрим основные принципы работы пьезоэлектриков, их механические, электрические и силовые характеристики.
Механические свойства
Механические свойства ЦТС имеют важнейшее значение при рассмотрении свойств пьзоэлементов. Сам пьезоэлектрический эффект, или, иначе говоря, изменения геометрической формы или размеров устройства, вызванного приложенным электрическим полем, делают эти устройства идеальными для точного перемещения и позиционирования. Например, пьезопривод обычно используется для управления решеткой обратной связи в лазере с внешним резонатором и позволяет пользователю выбирать длины волн с высокой точностью. Эти устройства также отлично подходят для активной стабилизации платформ и даже используются в космических шатлах НАСА для предотвращения вибрации прибора во время взлета или входа в плотные слои атмосферы.
Существуют три основных категории ЦТС приводов: низковольтные, высоковольтные и кольцевые приводы. Механический сдвиг у низко-и высоковольтных приводов очень похож, однако между ними существуют значительные различия в электрических свойствах. На рис. 1 показаны типы деформированных состояний, которые включают не только направленное сжатие, но также удлинение и сдвиг. Удлинение аналогично сжатию, за исключением оси [1,1] или [2,2]. Сдвиг происходит, когда приложенное электрическое поле ортогонально как поляризации, так и направлению движения.
|
|
|
| а) | б) | в) |
|
Рис. 1 Расширение пьезоэлемента с приложенным напряжением (а), многослойный пьезоэлемент (б),
конструкция кольцевого пьезопривода (в)
|
||

Как и в случае удлинения, смещение в приводах сдвига увеличивается за счет использования многослойной структуры, которая показана на рисунке 2. Кольцевые приводы, имеющие многослойную структуру, имеют аналогичные свойства. Кроме того, существует объемный аналог кольцевого привода, известный как трубчатый привод. Этот привод представляет собой полый цилиндр, такой же, как кольцевой привод, с металлизированной внутренней и внешней поверхностями для электрического контакта. В общем случае кольцевые приводы, имеющие многослойную структуру, способны реализовывать более высокие скорости деформации и доступны в конструкциях с низким напряжением, и поэтому их часто выбирают вместо трубчатых приводов. Тем не менее, трубчатые приводы могут быть использованы для обеспечения осевого смещения, радиального смещения и изгиба, что иллюстрирует рисунок 3. Цилиндрические приводы для изгиба часто можно найти в таких устройствах, как сканирующие в плоскости XY трубки. Подобные смещения описаны в уравнениях, приведенных ниже.
Рис. 2 Многослойная структура ЦТС
|
|
|
| а) | б) | в) |
|
Рис. 3 Осевое смещение (а), радиальное смещение (б), привод изгиба (в)
|
||
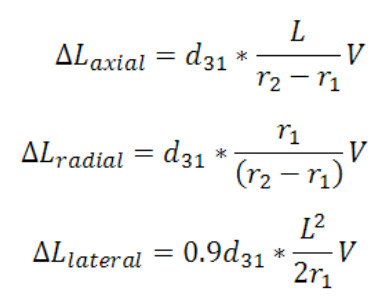
где L - длина привода;
r1 - внутренний радиус;
r2 - внешний радиус.
На примере приводов сдвига, и трубчатых приводов можно показать, что в пьезоэлементах могут использоваться различные константы деформации для достижения желаемых высокоточных соединений элементов. На субрезонансных частотах смещение (часто называемое ходом) пьезоэлектрического преобразователя следует сразу после приложенного сигналом напряжения. Величина хода зависит от изменения напряжения, приложенного к пьезоэлементу и ограничена длиной свободного хода. В системе с разомкнутым контуром будет присутствовать гистерезис хода, подобный показанному на рисунке 4. Точная форма и характеристики гистерезиса сильно зависят от разности приложенного напряжения, а также от условий окружающей среды и системы, таких как температура или приложенная нагрузка. Эта зависимость связана с источником гистерезиса в ЦТС, эффектами поляризации в кристаллах и молекулярного трения.
Гистерезис можно уменьшить, прикладывая меньшие разности потенциалов, хотя это приведет к ограничению диапазона хода. Другой альтернативой является контроль заряда; как следует из названия, пользователь контролирует заряд, приложенный к ЦТС, а не напряжение. Таким образом можно добиться уменьшения гистерезиса примерно на 10-15% в случае контроля напряжения и до 2% с помощью контроля заряда. Однако контроль заряда является менее эффективным для точного перемещения в течение длительного периода времени. Другим способом устранения гистерезиса может стать переход к замкнутой системе. Высокоточное соединение элементов часто выполняется посредством контроля напряжения многослойного ЦТС привода с использованием контура обратной связи. Следует отметить, что при использовании контура системы регулирования динамика системы (резонансная частота, ширина полосы и т. д.) будет определяться самой совокупной схемой, поэтому следует соблюдать осторожность при разработке контура системы регулирования, чтобы обеспечить его соответствие параметрам задачи.

Рис. 4 Пример гистерезиса ЦТС в диапазоне разностей приложенного напряжения
Сила и длина хода
Наряду с механическим сдвигом, действие силы пьезоэлемента является еще одним важным аспектом. Величина силы, которую может создавать пьезоэлемент, зависит от приложенной нагрузки к пьезоэлементу и того, как она изменяется с увеличением хода. Например, если сила постоянна, когда пьезоэлемент активен, наблюдается максимальный ход. Однако силы, которые значительно зависят от хода, требуют больших механических усилий со стороны пьезоэлемента. В этих ситуациях ход уменьшается. На рисунке 5 ниже показана типичная зависимость хода от силы. На этом графике также отмечены два очень важных параметра пьезоприводов: свободный ход (ΔLFS) и сила блокировки (FBlock).
Рис. 5 Пример рабочего графика ЦТС
Свободный ход пьезоэлемента определяется как ход при отсутствии какого-либо приложенного усилия (такого как предварительная нагрузка). Напряжение подается на пьезоэлемент, свободный от нагрузки, и измеряется результирующее смещение; это дает свободный ход. С другой стороны, блокирующая сила определяется как максимальная сила, которую может создать пьезоэлемент. Этот параметр обычно измеряется таким образом, сначала позволяя пьезоэлементу расширяться без усилий; затем внешнее усилие прикладывается до тех пор, пока он не будет сжат до его первоначальной длины. Эта измеренная сила и есть блокирующая сила. Из этих двух значений мы также можем определить жесткость (kА) пьезопривода:
Жесткость привода полезна для определения рабочих характеристик пьезоэлемента, а также для выбора подходящего усилия предварительной нагрузки. Можно исследовать пару систем, чтобы увидеть влияние предварительной загрузки и производительность пьезопривода. На рисунке 6 показана рабочая кривая для привода с (A) без нагрузки и (B) нагрузкой с малой жесткостью (kL << kA, где kL - жесткость нагрузки). Приведенное ниже уравнение показывает приблизительное смещение привода под нагрузкой:
Рис. 6 Рабочие кривые в случае отсутствия нагрузки и низкой жесткости пружины
В этом случае наблюдается слегка уменьшенный ход. Это происходит из-за силы, с которой пружина влияет на пьезоэлемент, что вызывает «самосжатие», которое уменьшает общий ход привода. Если ход и усилие рассматривать как взаимодополняющие свойства пьезопривода, становится видно, что пружина с низкой жесткостью создает смещение, близкое к смещению свободного хода, но с эффективной силой, значительно меньшей по сравнению с блокирующей силой. Пружина большой жесткости (kL >> kA) будет работать противоположным образом. Эффективная сила в этом случае определяется уравнением:
Отсюда показано, что эффективная сила стремится к блокирующей силе для пружин с большой жесткостью. Однако в случае проявления большой силы, ход будет сильно уменьшаться.
Если в качестве нагрузки на привод используется постоянная масса, то к приводу прикладывается сила, не зависящая от хода (m∙g). Рабочая кривая для этого показана на рисунке 7. Сила постоянной массы смещает нулевую точку на приводе, но поскольку сила постоянна, рабочая кривая выглядит очень похоже на таковую для незагруженного привода, так что ход остается близким к свободному ходу. Постоянная физическая нагрузка только сдвигает нулевую точку, обеспечивая начальное сжатие и поддерживая диапазон хода.
Рис. 7 Рабочие кривые в случае отсутствия нагрузки и постоянной массы
В любой реальной системе производительность будет представлять собой сочетание упругой силы и постоянных силовых нагрузок. Предварительная нагрузка в сочетании с действием упругих сил может обеспечить стационарное смещение, также как силы, зависящие от хода. Для предварительной нагрузки используется пружина с относительно малой жесткостью (kL ≤ kA / 10), и в некоторых конструкциях ЦТС она встроена в сам узел привода (т.н. предварительно нагруженный пьезоэлемент). Жесткость пружины предварительной нагрузки не должна быть больше, чем kА / 10, в противном случае ход будет значительно уменьшен (как показано на рисунке 7). Например, если пружина предварительной нагрузки имеет ту же жесткость, что и привод, ход уменьшается вдвое. Хотя может показаться, что использование предварительной нагрузки приводит к негативным эффектам, поскольку она приводит к уменьшению длины хода, но ЦТС — это керамика, а такие материалы подвержены определенным напряжениям. ЦТС конструкции особенно уязвимы к большим тяговым или сдвигающим силам, и система должна быть в состоянии изолировать привод от них. Подпружиненный исполнительный механизм может существенно увеличить производительность пьезоэлемента и оптимизировать конструкцию для динамического двухтактного применения.
Электрические свойства
Как правило, ЦТС обычно работают значительно ниже своей резонансной частоты (f0), особенно когда они используются для прецизионного позиционирования. Это необходимо, чтобы поддерживать разность фаз между приложенным напряжением и смещением ЦТС как можно ниже. Пьезоэлементы обычно могут работать как в режиме постоянного тока, так и в режиме переменного тока с частотой >10 кГц.
Резонансная частота ЦТС зависит от длины пьезоэлемента: чем меньше слоев, тем выше резонансная частота. К тому же, приведение в движение нагрузки массой М может изменить резонансную частоту. Приведенное ниже уравнение показывает, как рассчитать скорректированную резонансную частоту с добавлением нагрузки:
где m - масса привода;
M - масса груза.
Хотя минимальное время, необходимое для расширения пьезоэлемента, составляет примерно 1/(3f0), максимальная скорость привода зависит от пикового тока используемого источника питания. Кроме того, реакция ускорения привода зависит от максимальной скорости нарастания выходного напряжения его источника питания. Как только пьезоэлемент расширяется или сжимается до номинальной длины, наступает затухающее колебание длины привода вокруг значения этой номинальной длины. Могут быть реализованы элементы управления для смягчения этих колебаний, но это может привести к замедлению реакции привода. При работе ниже своей резонансной частоты привод ведет себя как конденсатор и может быть смоделирован как таковой. Значение емкости привода зависит от площади и длины привода, а в составных конструкциях емкость также зависит от количества слоев, и определяется как:
где C – емкость;
n - количество слоев;
ε - диэлектрическая проницаемость;
A - площадь поперечного сечения;
hL - толщина пьезослоя.
Кроме того, ЦТС имеет исключительно низкие значения тока утечки. Таким образом, в системах, использующих привод статически, ЦТС будет использовать очень мало энергии и выделять очень мало тепла. Однако динамические приложения могут потребовать значительно более высокого напряжения для привода, и привести к нежелательному выделению тепла. Это связано с линейной зависимостью между генерируемой тепловой мощностью (P) и рабочей частотой (f) для ЦТС, которая определяется как
где tan(δ) - коэффициент диэлектрических потерь;
C - емкость привода;
Vpp - пиковое напряжение возбуждения.
Для большинства стандартных приводов ЦТС величина генерируемой тепловой мощности может составлять порядка 2% от общей входной мощности, что может быть значительно для приводов высокого напряжения. Для высокочастотных или амплитудных систем процент увеличивается еще больше, и для правильной работы может потребоваться охлаждающий сервопривод.
Статическая работа привода
Статический режим работы привода весьма примитивен. Этот режим охватывает не только использование ЦТС для фиксации позиции, но и в качестве медленного динамического позиционера. В этом режиме использования привода необходимо отследить запас энергии в ЦТС, и токи, связанные с переносом заряда. Энергия рассчитывается как:
Формула для расчета тока (переноса заряда):
Единственное требование к силовому приводу для статического удержания — это компенсация малого тока утечки из ЦТС. К тому же, медленное позиционирование требует очень малых токов. Следовательно, при статической или слабодинамической работе необходимые токи очень малы, и большинство силовых приводов являются подходящими для этого приложения.
Прецизионное управление обычно использует схему автоматического регулирования для управления ЦТС. Эта система автоматического управления устранит гистерезис, обнаруженный в конфигурации с разомкнутым контуром. Другие важные параметры, такие как полоса пропускания, время нарастания, усиление, единичное усиление и т. д. будут определяться в первую очередь самой схемой. Скорость работы схемы автоматического регулирования довольно низкая, что снимает некоторые ограничения на пропускную способность силовых приводов. Кроме того, эта конфигурация не может работать в импульсном режиме.
Динамическая работа привода
Для непрерывной динамической работы привода, ЦТС обычно приводится в действие при помощи генератора переменного напряжения, инициируя синусоидальные, треугольные или пилообразные колебания. При работе на высокой частоте привод проходит через большое количество механических циклов, поэтому для привода важны такие свойства, как долговечность и прочность. Чтобы создать систему, которая является прочной, надежной и работает точно в течение длительного времени, необходимо согласовать ЦТС с соответствующим усилителем ЦТС. Усилитель должен иметь возможность подавать ток, требуемый для работы устройства на основе ЦТС, в желаемом диапазоне частот для работы ЦТС. Точные значения тока, напряжения и частоты будут зависеть от характеристик используемого ЦТС и типа сигнала привода (синусоидальный, треугольный и т. д.). Ниже будут рассмотрены наиболее распространенные типы сигнала привода: синусоидальный и треугольный.
Типичной характеристикой, заданной для пьезоусилителей, будет средний ток (Iave). Эта величина должна быть большой, чтобы обеспечить ЦТС необходимым для работы током. В случае непрерывного синусоидального режима средний ток пьезоэлемента задается следующим уравнением:
![]()
где C – емкость;
Vpp - пиковое напряжение привода;
f - частота привода.
Средний ток рассчитывается после определения напряжения и частоты привода. Пьезоусилитель должен обеспечивать подачу необходимого напряжения и тока. Средняя необходимая мощность задается уравнением:
Привод также можно использовать в импульсном режиме, подавая единичные синусоидальные импульсы. В импульсном режиме необходимо, чтобы усилитель мог поддерживать пиковый ток в течение по крайней мере половины периода действия одиночного импульса. Среднее время действия пикового тока не может превышать время действия среднего значения тока. Максимальный ток определяется как:
![]()
Максимальная мощность, необходимая для импульсного режима работы:
При использовании сигнала в виде треугольной волны в качестве источника привода важны как Iave, так и Imax. Силовой привод должен обеспечить максимальный ток, в то время как средний ток определяет ограничение частоты возбуждения:
При модуляции на некоторой частоте f важно помнить о пропускной способности самого пьезоэлемента, особенно при использовании вида волн, которые отклоняются от вида синусоидальных. Если полоса пропускания силового привода близка или меньше, чем частота, на которой осуществляется управление, тогда может иметь место значительное смещение сигнала возбуждения. Чтобы избежать этого, необходимо использовать привод с пропускной способностью, примерно в 10 раз большей, чем задающая частота.
Пьезоэлементы также могут использоваться для импульсных применений, таких как впрыскивающие или гидравлические клапаны, реле переключения и т. д. В этом случае цель состоит в том, чтобы вызвать смещение ЦТС за максимально короткое время, чтобы обеспечить быстрое переключение. Время отклика порядка микросекунды и ускорение доступа 10000g возможны, но потребуют значительного пикового тока от силового привода. Как упоминалось ранее, самое быстрое номинальное смещение, которого может достичь привод, составляет 1/(3f0). Отсюда методом аппроксимации можно вычислить минимальное время перемещения в импульсной системе:
Пропускная способность привода в этом случае снова становится ограничением. Длительность фронта импульса привода должна быть меньше, чем время отклика ЦТС. Поэтому лучше всего выбирать силовой привод с полосой пропускания, которая в 2–3 раза превышает резонансную частоту.
