
Гиперспектральная система для определения характеристик металлических сплавов в перерабатывающей промышленности

1. Введение
В последнее десятилетие рост перерабатывающей промышленности требует появление новых технологий сортировки. В частности, для транспортных средств с истекшим сроком эксплуатации и отработанного электрического и электронного оборудования.
Несмотря на значительный прогресс, достигнутый для частиц средних размеров (от 100 до 5 мм), переработка мелких частиц (<5 мм) все еще требует инновационных методов определения характеристик и сортировки.
Высокоскоростная гиперспектральная визуализация, уже хорошо развита в различных областях промышленности, в частности в фармацевтической, пищевой и минеральной отраслях и представляет собой перспективную неразрушающую технологию для предоставления информации о поверхностных свойствах материалов. С исследованиями по определению характеристик элементов в перерабатывающей промышленности с гиперспектральной визуализацией Вы можете ознакомится в работах [1,2].
В данной статье представлена процедура калибровки гиперспектральной системы на базе двух камер. Первая имеет рабочий диапазон от видимой до ближнего ИК области спеткра (VNIR от 400 до 1000 нм), а рабочий диапазон второй охватывает коротковолновый ИК спектр (SWIR от 1000 до 2500 нм).
Разработанная установка получает комплексную информацию об отражении мелко измельченных частиц металлического сплава. Полученные данные будут использованы для характеристики и сортировки мелких частиц в промышленных условиях. Различные методы машинного обучения тестируются для классификации спектров отражения. Целью данной работы является обсуждение трудностей, возникающих при разработке такой системы, предложение решений для оптимизации качества данных, а также описание возможностей и ограничений гиперспектральной визуализации при исследовании металлических сплавов.
2. Материалы и методы
2.1 Объект исследования
Элементы, рассматриваемые в этом исследовании, в основном представляют собой металлические сплавы, поступающие из процессов переработки транспортных средства с истекшим сроком эксплуатации и отработанных электрических и электронных приборов. Они состоят из частиц различной природы, форм, размеров, текстур и форм сплавов.
Основными элементами в этом потоке являются железо (из нержавеющей стали), медь, цинк, свинец и алюминий. Другие элементы присутствуют в меньших количествах, такие как никель, магний, титан, хром, марганец и т. д. Основные классы были определены в соответствии с их приоритетом в этом продукте и в соответствии с их различающим потенциалом на основе их поверхностных свойств (например, латунь считается отдельным классом, кроме меди и цинка).
Как будет показано позже в главе Классификация, кривые отражения металлических сплавов обычно представляют монотонные тренды, в отличие от пластмасс, органических материалов 3 или минералов 4, которые имеют особенные формы спектра, что повышает эффективность классификации на основе гиперспектральной визуализации. На рисунке 1 показаны усредненные кривые для интервала VNIR (интервал SWIR еще более монотонен), полученные для основных элементов. Наблюдаемые значения могут быть хуже некоторых значений, найденных в литературе для аналогичных материалов, но следует иметь в виду, что поверхностные свойства фрагментов были значительно ухудшены в процессе измельчения / фрезерования. Из измерений с помощью лазерной пробойной спектроскопии также было установлено, что присутствие других мягких металлов, таких как магний, цинк, свинец или медь, в измельчителе также способствует изменению поверхностных свойств. Различные свойства состояния поверхности фрагмента, скорее всего, являются основным источником ошибок в характеристике этих материалов. Согласно этим наблюдениям, образцы были предварительно отшлифованы, чтобы удалить грязь и окислительный слой с поверхности.
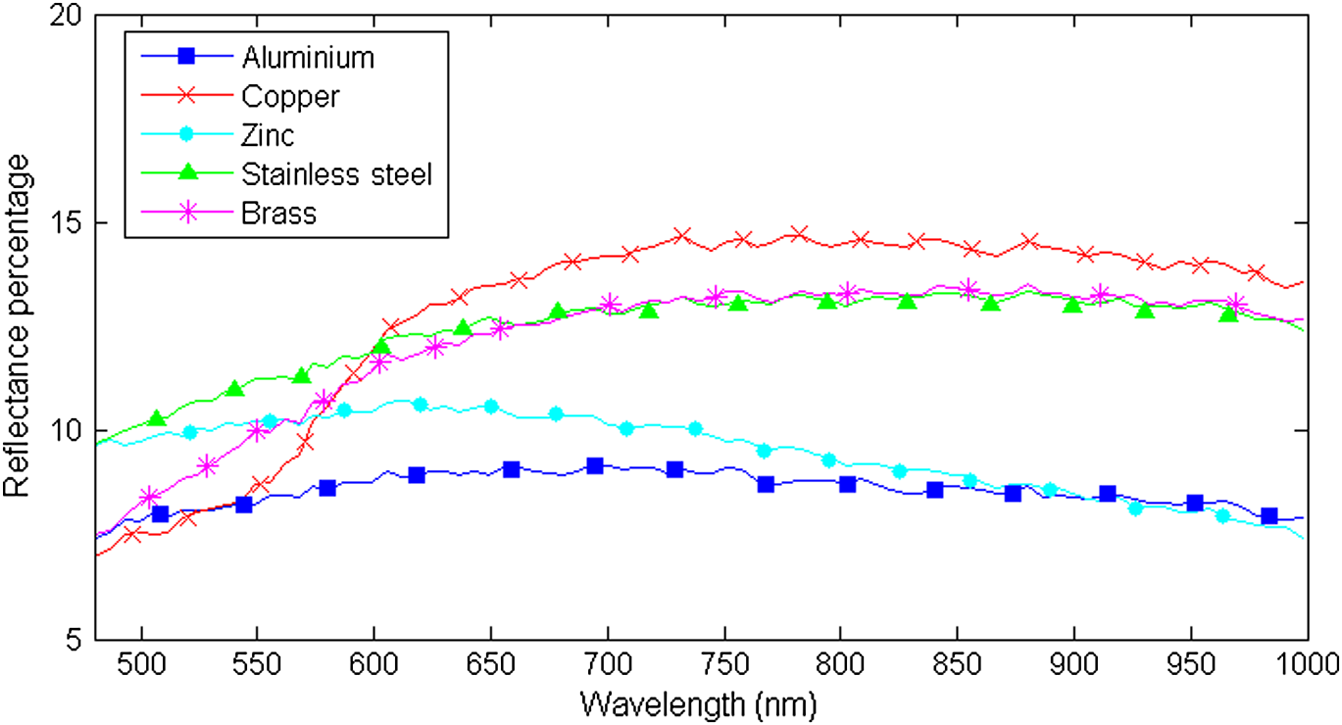
Рис. 1 Типичные кривые отражения для материалов, рассматриваемых в диапазоне VNIR.
2.2. Оборудование
Для получения изображений используются две гиперспектральные камеры: камера VNIR, которая состоит из датчика Photonfocus MV1-D1312ie и спектрографа Specim (ImSpectorV10E) и SWIR-камеры Specim для интервала от 1000 до 2500 нм (рис. 2). Камера VNIR представляет собой сенсор с разрешением 1312x1082 пикселя (с размером пикселя 8x8 мкм) со спектральной чувствительностью от 320 до 1030 нм. Спектрограф рассеивает входящий свет вдоль оси датчика 1082 пикселя при 97.5 нм ∕ мм, что дает теоретический интервал длин волн 843.96 нм и спектральное разрешение 0.78 нм ∕ пикселей. Весь интервал не используется, так как сочетание чувствительности камеры и спектра излучения галогена не обеспечивает достаточного сигнала на краях сенсора. Эта версия камеры имеет функцию биннинга, позволяющую обрабатывать несколько смежных линий пикселей во время оцифровки. Эта функция используется для уменьшения числа спектральных полос с 1082 до 135 путем одновременной оцифровки восьми строк. Следовательно, разрешение по длине волны увеличивается до 6.25 нм ∕ цифровой пиксель, что ближе к фактическому спектральному разрешению спектрографа (который выше 6 нм ∕ пиксель).
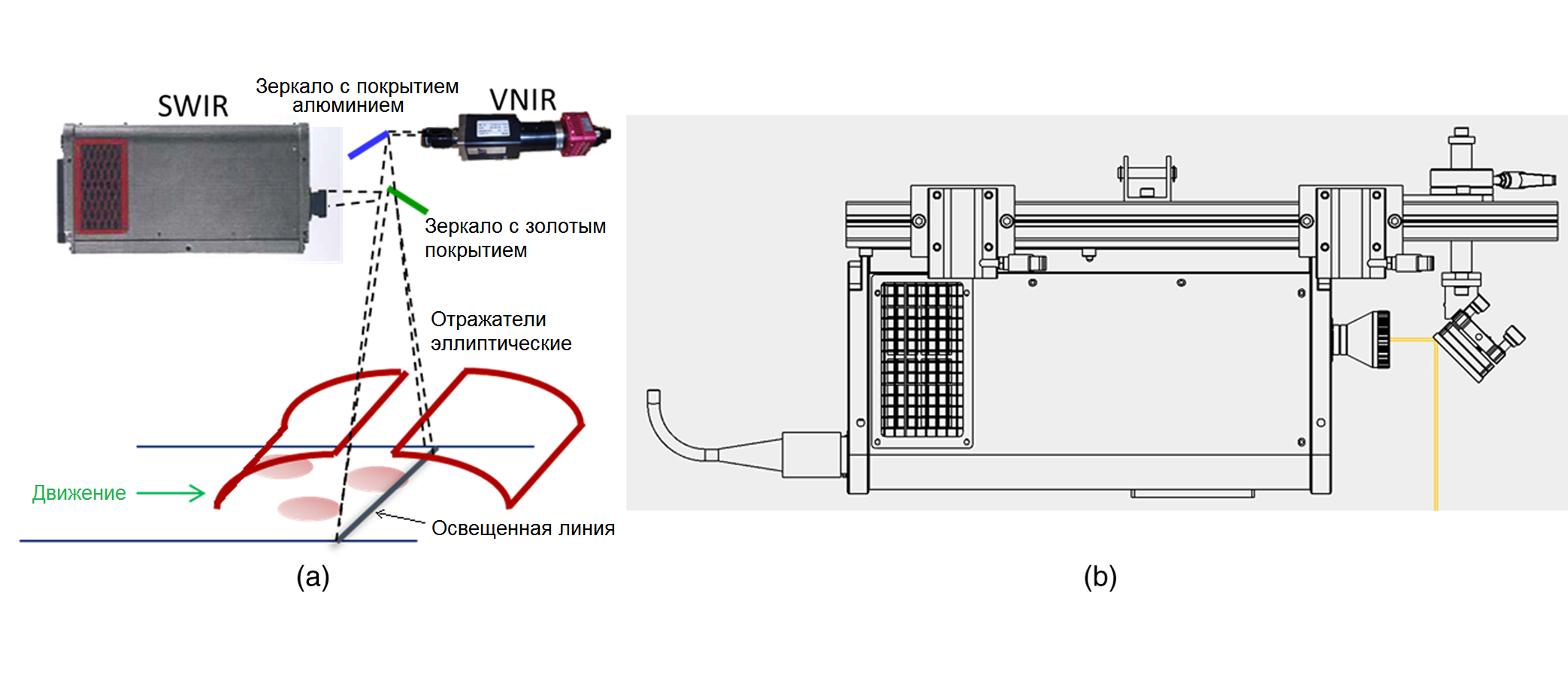
Рис. 2 (а) Схематическое изображение установки камер и зеркал. (б) Крепежная система между камерой и ее зеркалом.
Благодаря объединению данных, предоставленных двумя камерами, покрывается значительная часть спектра отражения.
Рама высотой 2.5 м была сконструирована для того, чтобы держать камеры на соответствующих высотах. Установка проецирует 400-миллиметровую линию на конвейерной ленте. Частицы подают через вибрационное дисперсионное устройство для отделения вдоль ленты. Это должно облегчить сегментацию частиц при обработке изображений и, в конечном итоге, при механической сортировке. Рис. 3 и 4 демонстрируют различные части итоговой установки.
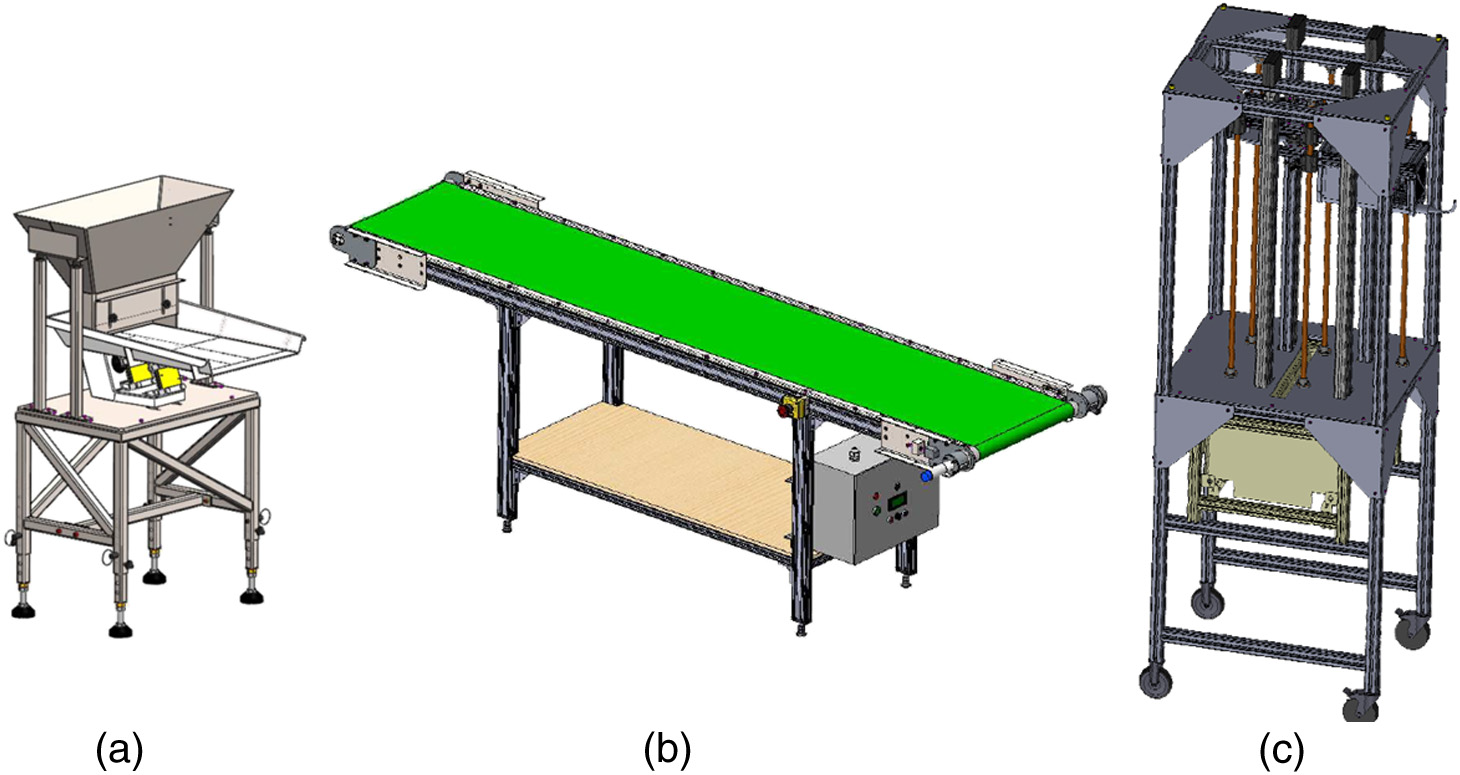
Рис. 3 Части установки: (а) дисперсионная система, (б) конвейерная лента и (в) рама с камерами и системой освещения.
Используется система для освещения линии в поле зрения. Камеры установлены горизонтально, а два зеркала (с алюминиевым покрытием для VNIR и позолоченным для SWIR) используются для перенаправления света, отраженного от одной линии, на входную щель обоих спектрографов (рис. 2). Такая установка требует калибровки. Первый шаг: когда обе камеры установлены на выбранной высоте; шаг двух зеркал должен быть отрегулирован так, чтобы можно было видеть одну и ту же линию с обоих камер. Для этой цели используется тонкая отражающая нитка. Фокусировка выполняется с использованием мишени со стандартным разрешением путем регулирования обоих объективов таким образом, чтобы резкость изображения была оптимальной для центральных длин волн обоих датчиков (примечание: перед камерой VNIR стоит объектив Schneider Optics Xenoplan 1.9∕35 мм, с широкополосным покрытием и с поправкой на непрерывную визуализацию в диапазоне от 400 до 1000 нм, но он все же имеет некоторые флуктуации фокуса для разных длин волн.
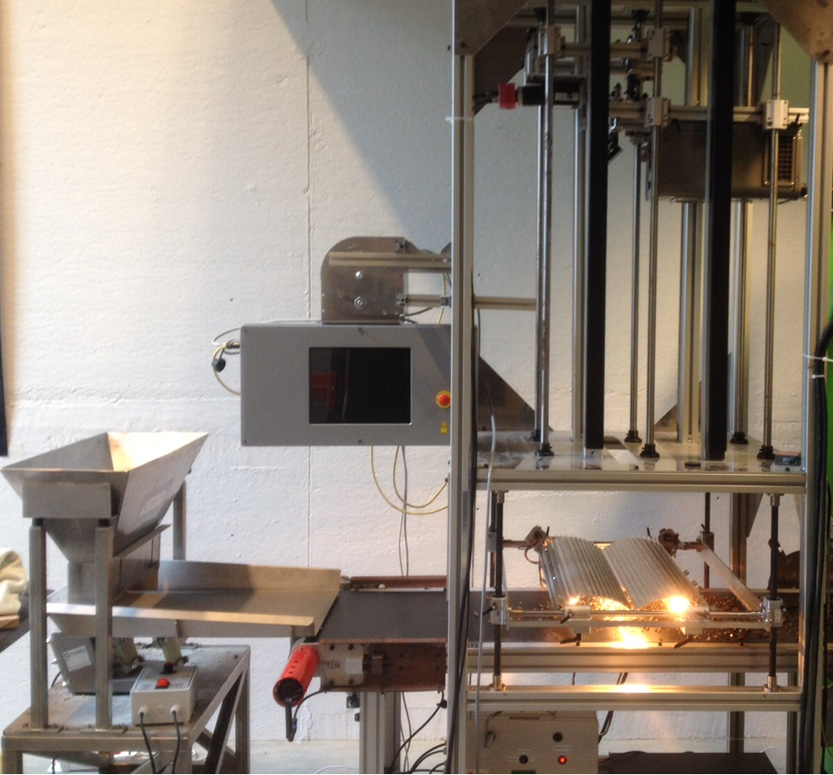
Рис.4. Установка в сборе.
Последней сложной частью установки, с точки зрения получения качественных данных, является система освещения. Система освещения была разработана по принципу экструдированного эллиптического отражателя. Отражатели фокусируют поступающий свет от галогенных ламп в одну линию, соответствующую одному фокусу эллипса (рис. 5). Эта настройка позволяет максимизировать угол сбора света. Она предназначена для уменьшения изменения измеренной отражательной способности, вызванной зеркальным отражением. Было обнаружено, что измерение коэффициента отражения от частиц, представляющих важные изменения в размере и форме, очень чувствительно к однородности системы освещения вдоль измеряемой линии (ось Y) и перпендикулярно плоскости конвейерной ленты (ось Z). Верхняя часть конвейерной ленты установлена в середине интервала высоты, представляя лучший компромисс между интенсивностью света и минимальной изменчивостью вдоль оси Z. Эта плоскость расположена на несколько миллиметров ниже освещенной полосы, соответствующей фокусной оси эллипсов (рис. 5). На этом уровне освещенность немного уменьшается по сравнению с точной высотой фокуса, но однородность света вдоль Z значительно увеличивается.
Однородность света вдоль Z имеет решающее значение и будет непосредственно влиять на этапы калибровки, описанные в разделе 4. Действительно, радиометрическая калибровка, которая является мерой распределения света по всей освещаемой линии, обычно выполняется на одной высоте. В лучших случаях эти этапы калибровки обеспечивают двумерную матрицу коррекции света (вдоль пространственных пикселей и спектральных полос). Однако, если сигнал значительно изменяется вдоль Z, калибровку света следует выполнять как функцию высоты, что приведет к усложнению калибровки.
Специальное программное обеспечение (C++) было разработано для сбора и обработки в реальном времени полученных гиперспектральных изображений. Кроме того, было разработано другое программное обеспечение, совместимое с форматом файла ENVI, для дальнейшей обработки изображений и для обучения инструментам машинного обучения на выбранных образцах. Классификаторы можно экспортировать и использовать в программном обеспечении сбора данных. Значительные результаты калибровки или наблюдения производятся в MATLAB.
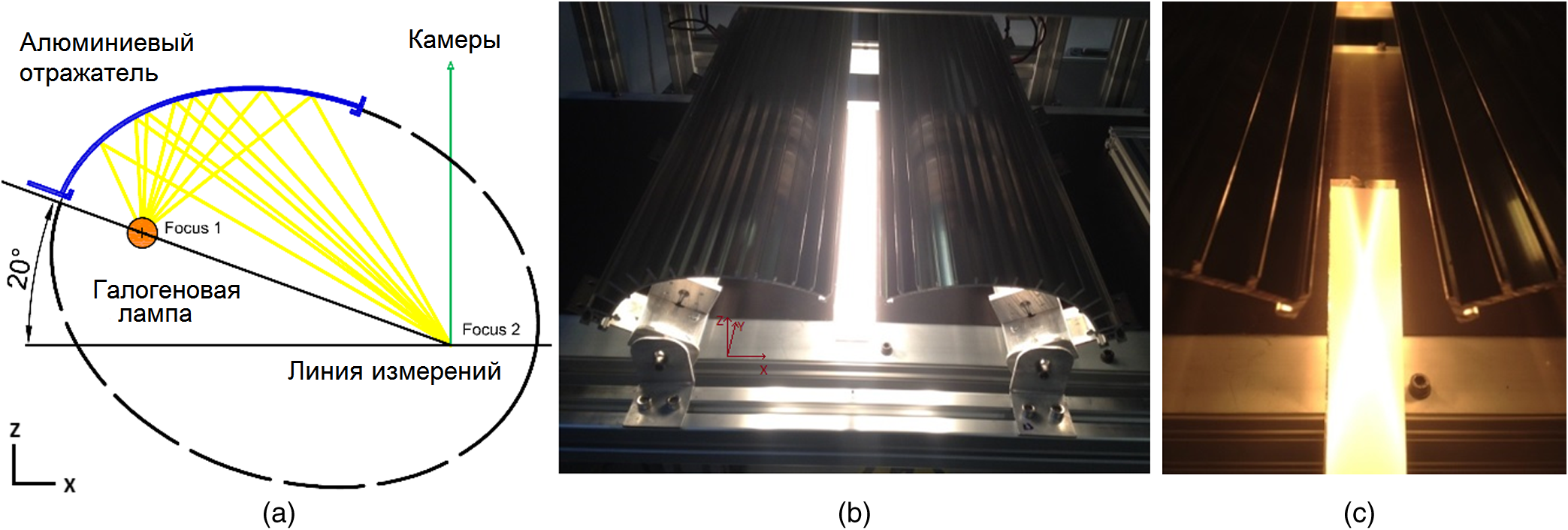
Рис. 5 (а) Оптическая схема эллиптического отражателя. (б) Система освещения. c) Изменение полосы освещения в зависимости от высоты (эталонный стандарт наклонен); в нижней части фокуса обоих эллипсов (соответствующий наиболее освещенной точке) распределение света является достаточно однородным с высотой в несколько сантиметров.
3. Объединение изображений
Перед калибровкой камер необходимо было найти правильный способ объединения данных VNIR и SWIR. Для обработки огромного количества данных, поступающих с обеих камер, необходимо было найти компромисс между определенной потерей информации и избыточной записью данных изображения с полным разрешением. Пространственное разрешение вдоль измеренной линии составляет соответственно 1312 пикселей для VNIR и 320 пикселей для SWIR (низкое разрешение SWIR является неотъемлемым ограничением для ртутно-кадмиевых теллуридных датчиков). Кроме того, ширина обоих датчиков различна (10,5 мм для VNIR и 9,6 мм для SWIR соответственно), как и их объективы с разными фокусными расстояниями (35 мм для VNIR и 30 мм для SWIR соответственно).
3.1 Пространственные смещения
Для просмотра линии ∼400 мм, высоты датчиков были рассчитаны в соответствии с оптической геометрией выпуклой линзы. Камера SWIR была настроена таким образом, чтобы диаметр ее измеренного пятна на уровне конвейерной ленты был немного меньше диаметра камеры VNIR и полностью в нее входил. Это позволяет пользователю указать только левое и правое пространственное смещение для камеры VNIR. Выбранные смещения определяют, какие пиксели VNIR будут пропущены в объединенном гиперспектральном изображении для соответствия поля зрения камеры SWIR. На рис.6 показано изображение, полученное до и после установки правого смещения.
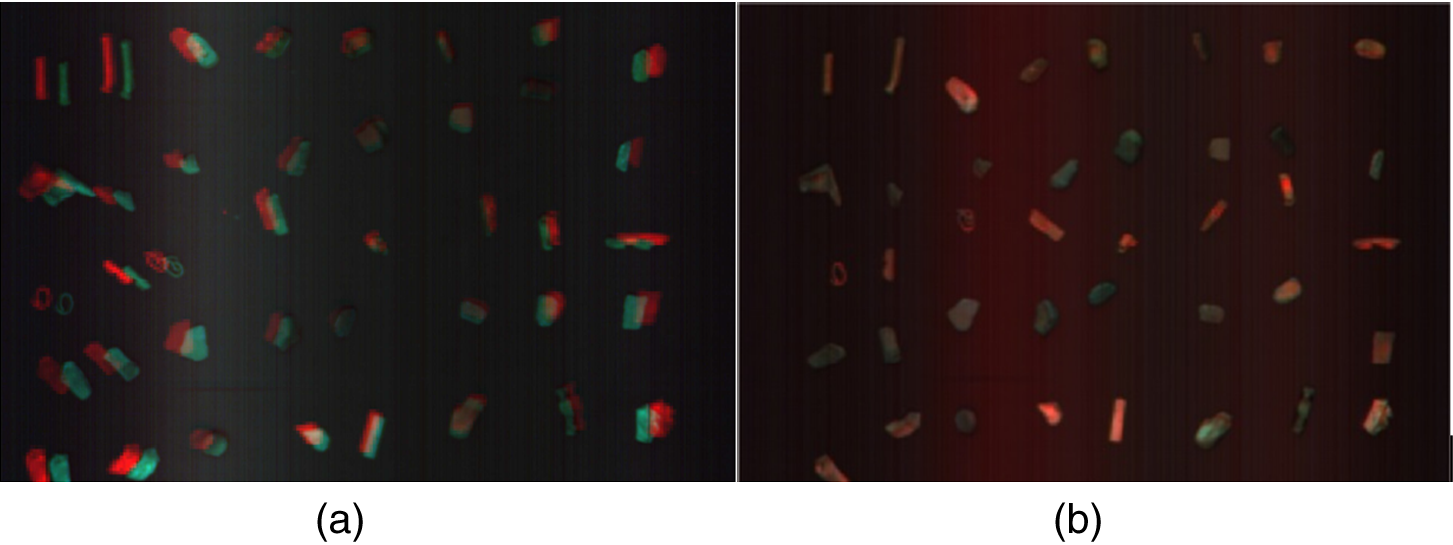
Рис. 6 Необработанное объединенное изображение [синие и зеленые каналы в видимой для ближней инфракрасной области (VNIR), красные в коротковолновой инфракрасной области (SWIR)] (a) до и (b) после совмещения.
3.2 Слияние пикселей
Чтобы сохранить гибкий подход к различным приложениям, предусмотренным для установки, пользователь должен выбрать подходящее разрешение для объединения изображений. Во время захвата, когда обе камеры получили достаточное количество кадров, в объединенном изображении создается новый ряд. Количество строк и столбцов, необходимое для вычисления одного нового пикселя в смешанном изображении, рассчитывается в соответствии с истинным разрешением камер, пространственными смещениями и средней частотой кадров обеих камер соответственно. Камеры запускаются сигналом, поступающим от кодера, управляющего движением конвейерной ленты, и преобразуются для получения «квадратных» пикселей.
На рис.7 показано схематическое представление пикселей, необходимых для создания нового пикселя в объединенном изображении. В программном обеспечении сбора данных предлагаются два метода: вновь созданный пиксель может принимать либо значение пикселя, центр которого является ближайшим, либо значение геометрического среднего окружающих пикселей. Обычно выбирается первый вариант, так как соотношение между разрешениями объединенного изображения и камер обычно ниже 1:4.
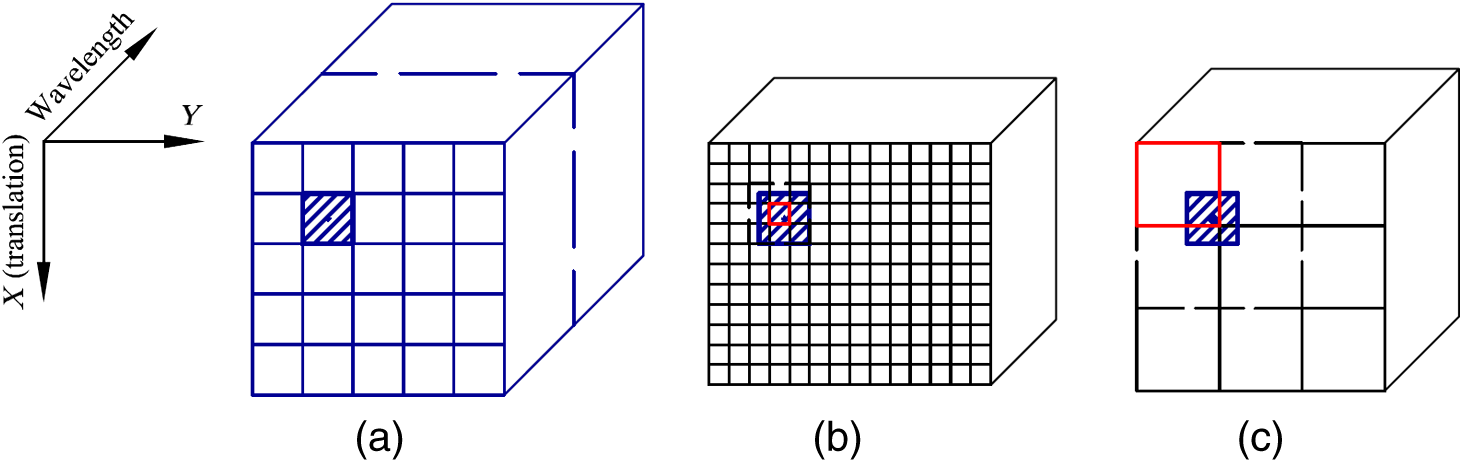
Рис. 7 Схематическое изображение слияния изображений VNIR и SWIR. Синий: пиксель объединенного изображения. Красный: пиксель, взятый во VNIR и SWIR, когда рассматривается только одно значение. Пунктирная линия: пиксели, используемые при расчете объединенного пикселя при выборе режима усреднения. (a) Двойное изображение, (b) VNIR камера, (c) SWIR камера.
4. Калибровка
Прежде чем выполнять анализ реальных данных, требуется несколько методов предварительной обработки для преобразования измеренных сигналов в набор данных, который является надежным, воспроизводимым и независимым от условий сбора данных. Эта фаза калибровки состоит из трех основных этапов:
- Калибровка длины волны
- Радиометрическая калибровка
- Уменьшение нежелательных свойств датчика, включая случайный шум и нелинейный отклик.
Действительно, многие нежелательные эффекты индуцируются источником, оптической системой, ведущей к датчику, и самим датчиком (такими как, соответственно, спектр излучения и стабильность источника света, поглощение зеркал, линз, спектрографов, smile/keystone эффект и рассеянный свет, индуцируемый объективом и спектрографом, и спектральная чувствительность камер).
4.1 Калибровка по длине волны
Этот шаг калибровки предназначен для согласования каждого пикселя датчика с диапазоном длин волн спектра. Существует несколько подходов для выполнения измерений, и несколько математических регрессий (линейный, квадратичный, кубический и т. д.) могут быть использованы для моделирования этой зависимости как функции числа пикселей. Поскольку длины волн будут слегка дрейфовать со временем и условиями окружающей среды, эта калибровка требуется проводить более одного раза.
В этом проекте монохроматор в сочетании с «белым» источником света и интегрирующей сферой использовался для освещения гиперспектральных камер при различных значениях длины волны с полосами шириной около 10 нм. Индексы строк пикселей датчика затем сравниваются с известными длинами волн излучения. В этом случае линейная регрессия была достаточной для достижения ошибки менее 0.2 пикселя. Как указано в разделе 2.2, спектральное объединение - 3 (8 пикселей) используется для приближения к собственному разрешению спектрографа (выше 6 нм), уменьшая количество пикселей с 1082 до 135). Использование полного диапазона спектральных полос или использование нижнего значения биннинга дает шумный сигнал.
4.2 Радиометрическая калибровка
Как упоминалось ранее, на измеряемый сигнал влияют многочисленные внешние эффекты, основными составляющими которых являются спектр излучения источника освещения (в нашем случае галогенная лампа) и спектральная чувствительность датчика (типичная кривая Гаусса, которая сильно уменьшается на краях спектрального диапазона камеры). Следовательно, этот шаг имеет решающее значение для выделения спектральных контрастов различных кривых отражения материала.
Традиционный способ преобразования измеренных данных в данные отражательной способности состоит в том, чтобы разделить полученный сигнал для определенного пространственного пикселя и длины волны на сигнал, измеренный с помощью стандарта диффузной отражательной способности ∼99% (такого как Spectralon®) при том же пространственном пикселе и длине волны:
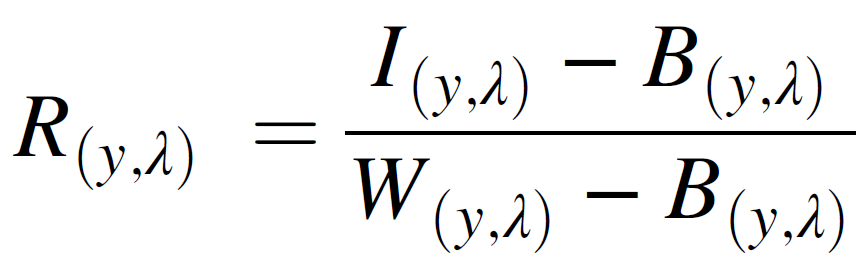
где R () - коэффициент отражения, B () - темный эталон, а W () - белый эталон вдоль линии (y) на длине волны λ. Знаменатель может быть дополнительно разделен на известную отражательную способность стандарта, особенно если изменение стандарта становится значительным (здесь, в интервале SWIR для Spectralon).
4.3 Исправление свойств датчика
4.3.1 Smile Коррекция
Эффект Smile является нежелательным явлением спектрального искажения, вызванным изменением дисперсии спектрографа в зависимости от положения поля. Этот эффект может быть незначительным для некоторых хорошо спроектированных камер (когда он сильно уступает размеру пикселя). В других случаях это вызывает неправильную спектральную регистрацию, которая повлияет на классификацию объектов, измеренных на границах поля зрения.
Наличие значительного Smile эффекта на изображениях, полученных с помощью нашей камеры VNIR, продемонстрировано на рис. 8 (а).
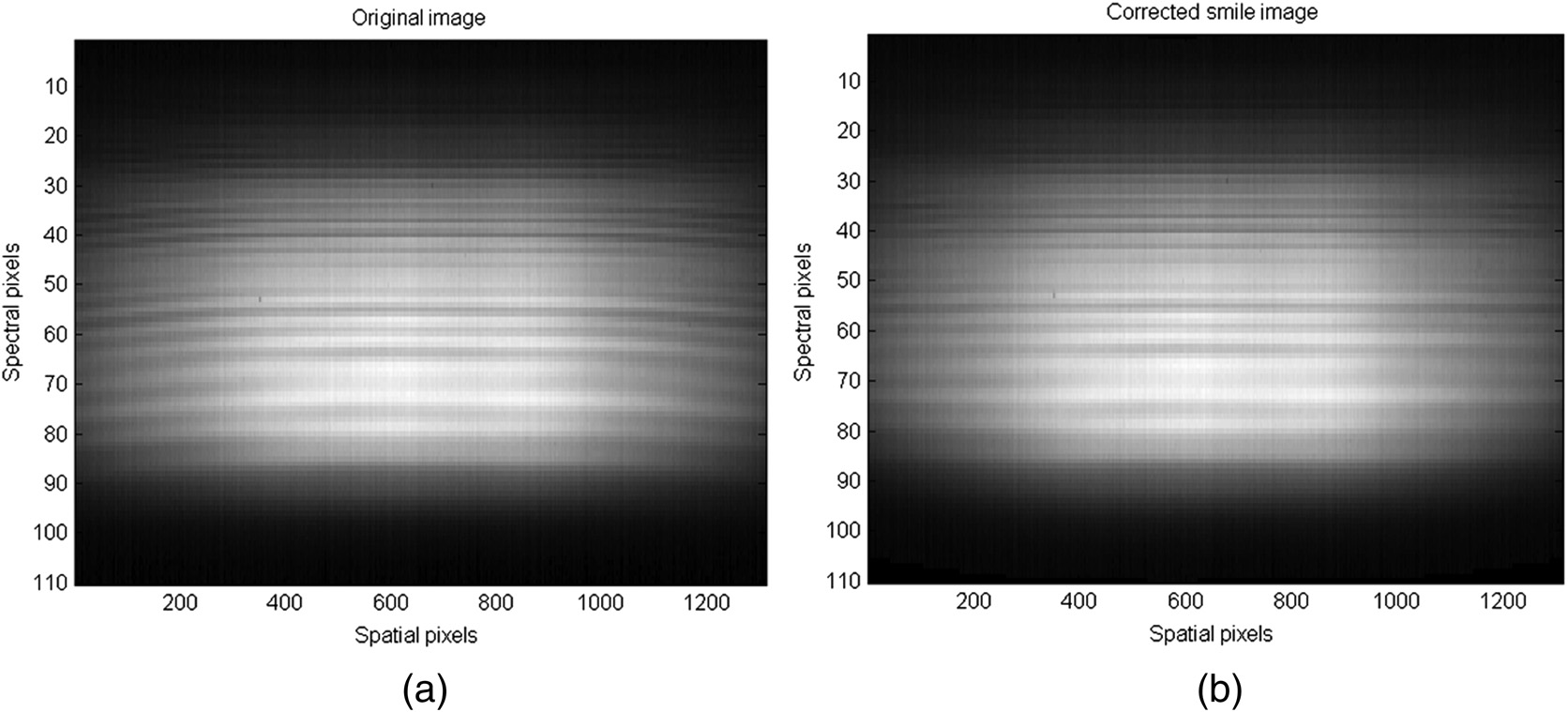
Рис. 8 Измерение в плоском поле (камера VNIR) (а) до и (б) после коррекции smile
В литературе существуют различные подходы для исправления Smile эффекта, путем его моделирования7 или, при дистанционном зондировании, путем его корректировки во время алгоритма атмосферной коррекции.8 В этом проекте был разработан простой и инновационный метод устранения Smile эффекта, основанный на приближении того, что спектральное искажение растет линейно с длиной волны.
Сначала, чтобы оценить спектральный сдвиг в соответствии с положением поля, были определены следующие этапы. Используемое изображение представляет собой необработанное спектральное изображение, измеренное на эталоне отражения (99%) (Spectralon):
- Выберите опорный столбец спектра (это должен быть центральный столбец сенсора. Если сенсор был правильно выровнен по спектрографу, полученные сигналы должны быть симметричны среднему столбцу).
- Извлеките высокочастотные волны сигнала, рассчитав разницу между сигналом и его сглаженным сигналом.
- Произведите цикл на пространственных пикселях (столбцах) камеры и извлекайте высокочастотный компонент, вычитая сглаженный сигнал.
- Рассчитайте взаимную корреляцию между текущим столбцом и справочным столбцом и найдите положение максимума этой корреляции.
Из-за взаимной корреляции, применяемой между каждым столбцом и опорным сигналом, максимальный спектральный сдвиг был идентифицирован и может быть сглажен для уменьшения «ступенчатых» эффектов, вызванных ограниченным пространственным разрешением сенсора. Этот вектор (рис. 9) будет затем использоваться для коррекции каждого кадра, полученного камерой.
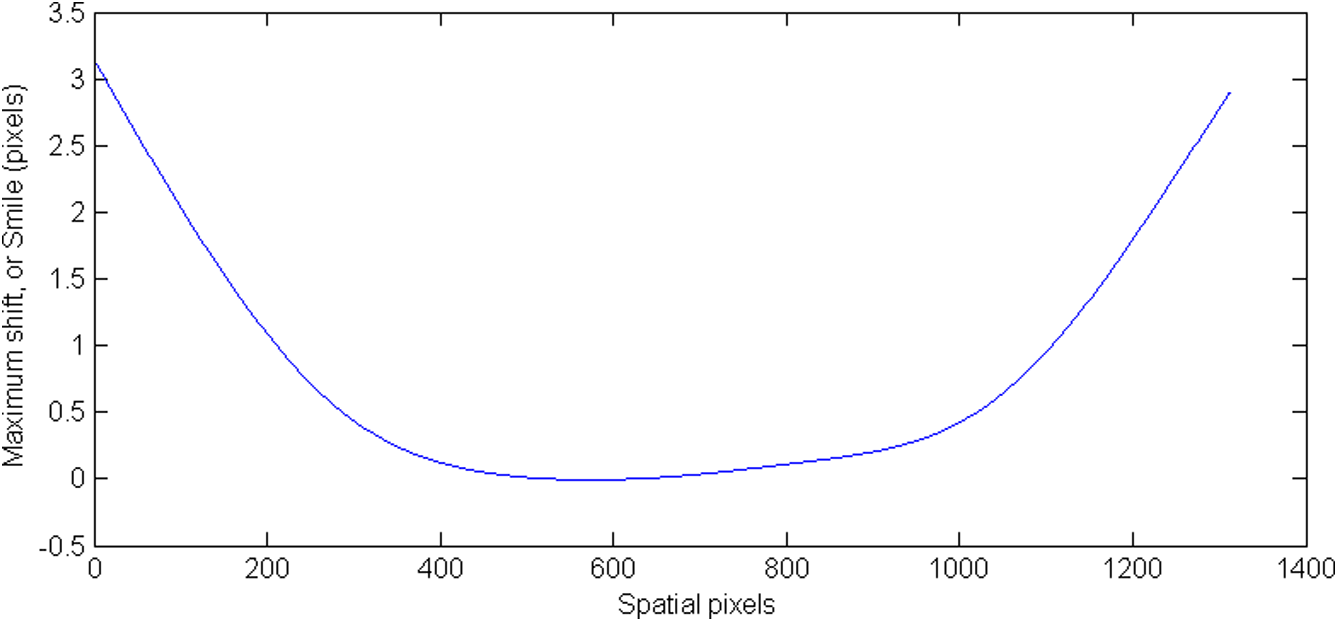
Рис. 9 Эффект Smile вдоль поля зрения, рассчитанный по взаимной корреляции между спектрами столбцов.
Этот сглаженный «вектор smile» позволяет нам корректировать новые кадры и получать тот же спектральный вектор вдоль пространственной оси камеры. Как было видно, компоненты с низкой длиной волны не показывают никакого сдвига вдоль пространственной оси, в то время как компоненты с высокой длиной волны должны быть сдвинуты на значение, равное или превышающее значение вектор smile. Было решено использовать уравнение, которое заставляет этот сдвиг изменяться линейно по длине волны [см ниже]. Сдвиг равен нулю для первой длины волны (i - индекс строки в логике на основе нуля) и равен 1-кратному вектору smile, когда i = K. Наилучшие результаты были получены при использовании K =70, что не удивительно, поскольку он соответствует интервалу длин волн, где сигнал является самым высоким (см. рис. 10), и, следовательно, наиболее взвешенным компонентом в вычислениях максимальной взаимной корреляции.
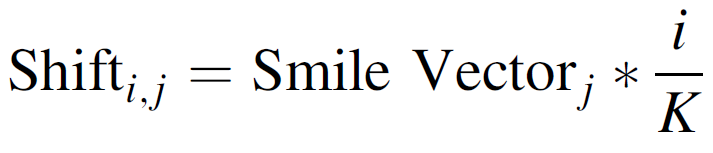
где i и j - соответственно текущие строки и столбцы и где K = 70. Каждый пиксель исправленного изображения затем вычисляется путем взятия средневзвешенного значения двух пикселей одного и того же столбца в строках, которые лучше всего соответствуют сдвигу. Сравнение необработанных и скорректированных спектров и изображений представлено ниже (рис. 10).
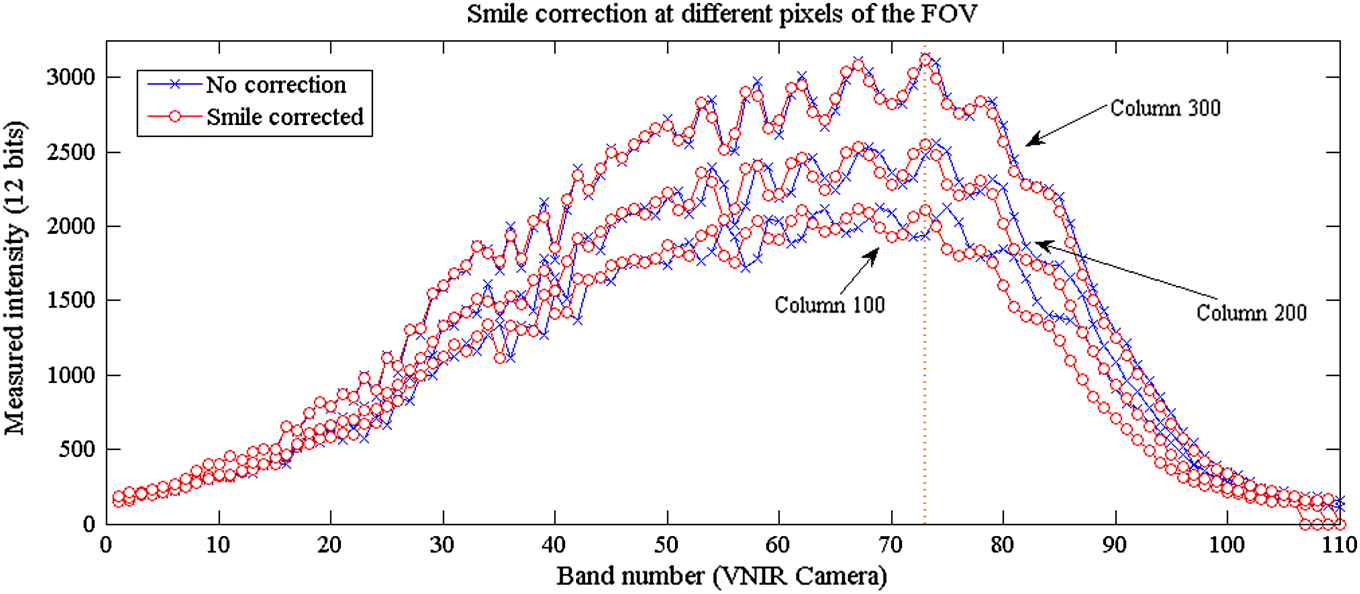
Рис. 10 Иллюстрация коррекции эффекта smile для разных столбцов данных 1312 пикселей. Видно, что коррекция значительна для 200 столбцов на границах поля зрения
4.3.2 Динамический шум
Динамический шум может появиться из-за тепловых потоков или электрических токов вокруг аналого-цифрового преобразователя. С помощью SWIR-камеры наблюдался значительный шум движущейся картины (рис. 11). Чтобы удалить этот шум во время калибровки черного и белого, использование медианы предпочтительнее, чем среднее геометрическое при расчете этих эталонных матриц из нескольких измерений. К сожалению, на данные в реальном времени все еще влияет этот шум для областей с низким отношением сигнал / шума. Тем не менее, он остается незаметным для большинства полос датчика на измеряемых частицах.
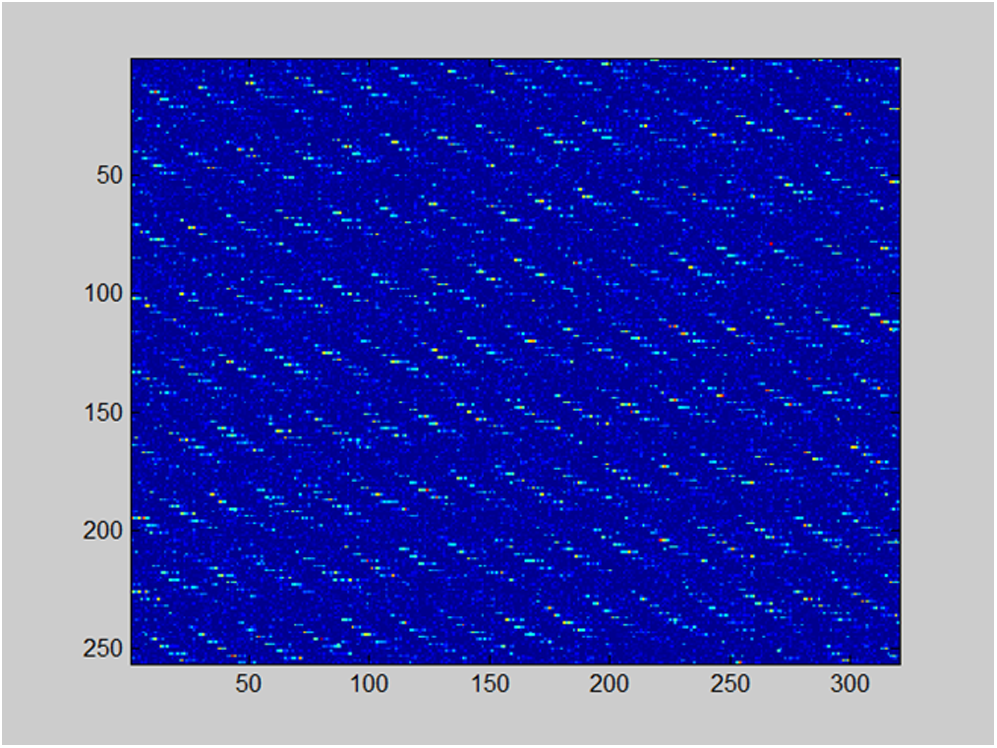
Рис. 11 Вычитание двух последующих темных кадров с помощью SWIR-камеры со скоростью 100 кадров в секунду.
4.3.3 Нелинейность
Радиометрическая калибровка, представленная ранее, действительна для линейного отклика, и эта поправка для частиц различной формы и значений отражательной способности может представлять разрывы между результатами, полученными на двух камерах (рис. 12). Это также можно наблюдать на рис. 13, где коэффициент отражения алюминия очень шумный около 1000 нм и, следовательно, прерывистый, в то время как Spectralon показывает хорошую корреляцию между двумя камерами. Различные факторы ответственны за это явление. Среди них, эффект нелинейного отклика датчика, который был изучен.
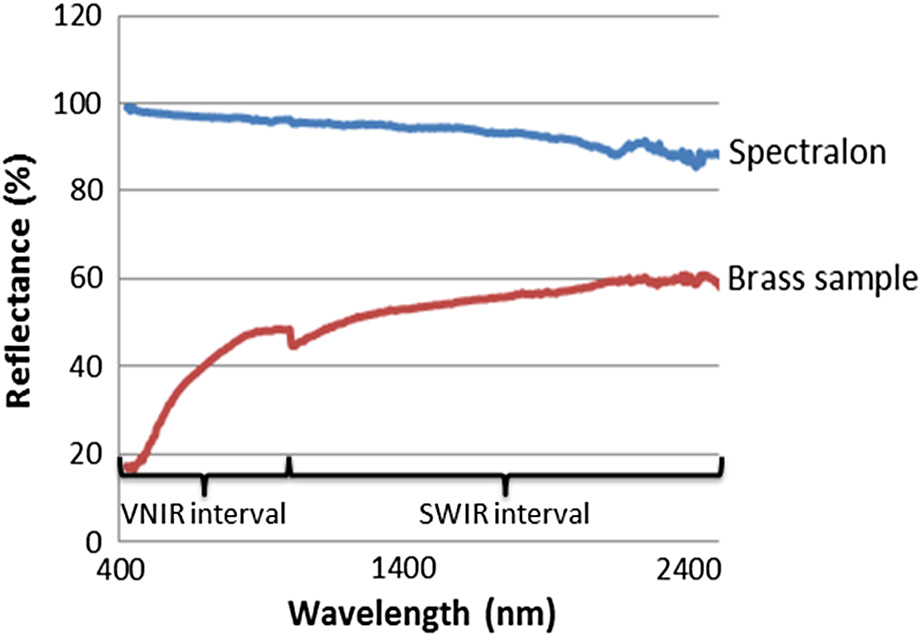
Рис. 12 «Порог», появляющийся на латунном образце, когда стандарт Spectralon, на том же изображении, хорошо коррелирует между VNIR и камерой SWIR
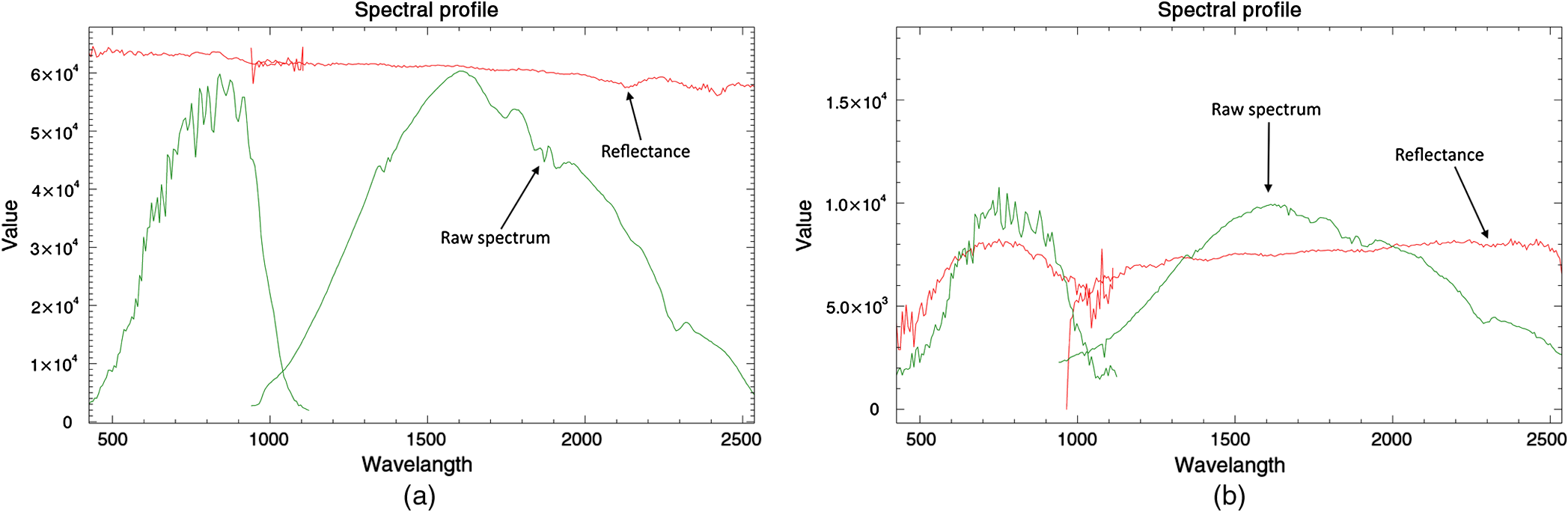
Рис. 13 Типичный эффект преобразования отражательной способности для одного пикселя. (а) стандарт Spectralon; (б) образец алюминия. Примечание: полосы, представляющие слишком много шума на границах интервала чувствительности обеих камер, удаляются перед этапом обработки.
Отклик гиперспектральных камер был сначала записан с разным временем экспозиции для неизменной установки. Затем были использованы несколько диффузных стандартов со средним значением отражательной способности (2%, 5%, 10%, 20%, 40%, 60%, 80% и 99%). В то время как измеренные значения, полученные с использованием разных стандартов, показывают разное распределение для двух камер (рис. 14). Значительное нелинейное поведение наблюдается для низкого интервала сигнала.
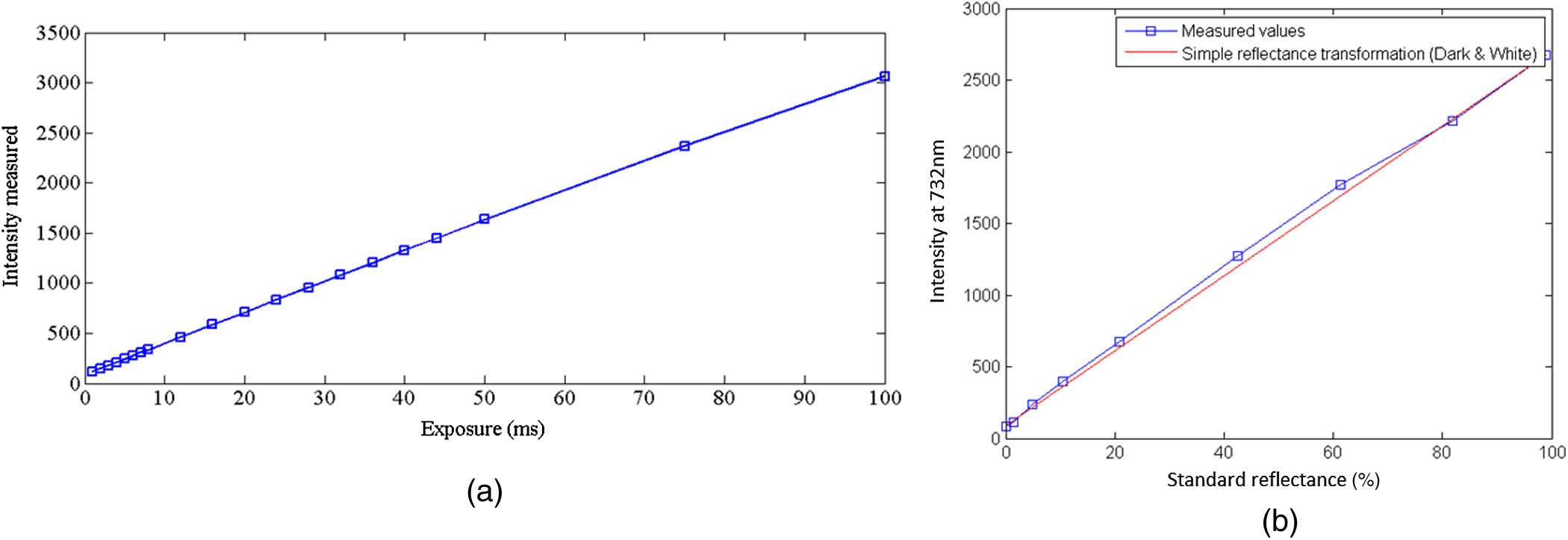
Рис. 14 (а) Линейная зависимость между временем воздействия и измеренным сигналом. (b) Нелинейный отклик VNIR для постоянной экспозиции, измеренной восемью известными стандартами отражательной способности, в центре измеренной линии.
Измеренные значения могут использоваться в качестве новых эталонов для исправления нелинейности в одной точке поле зрения через справочную таблицу (LUT). Справочная таблица позволяет преобразовать измеренный сигнал для каждой длины волны в коэффициент отражения, полученный путем линейной регрессии между известными измеренными значениями (рис. 15). Таким образом, можно преобразовать каждый уровень серого цвета камеры в коэффициент отражения для каждой возможной длины волны.
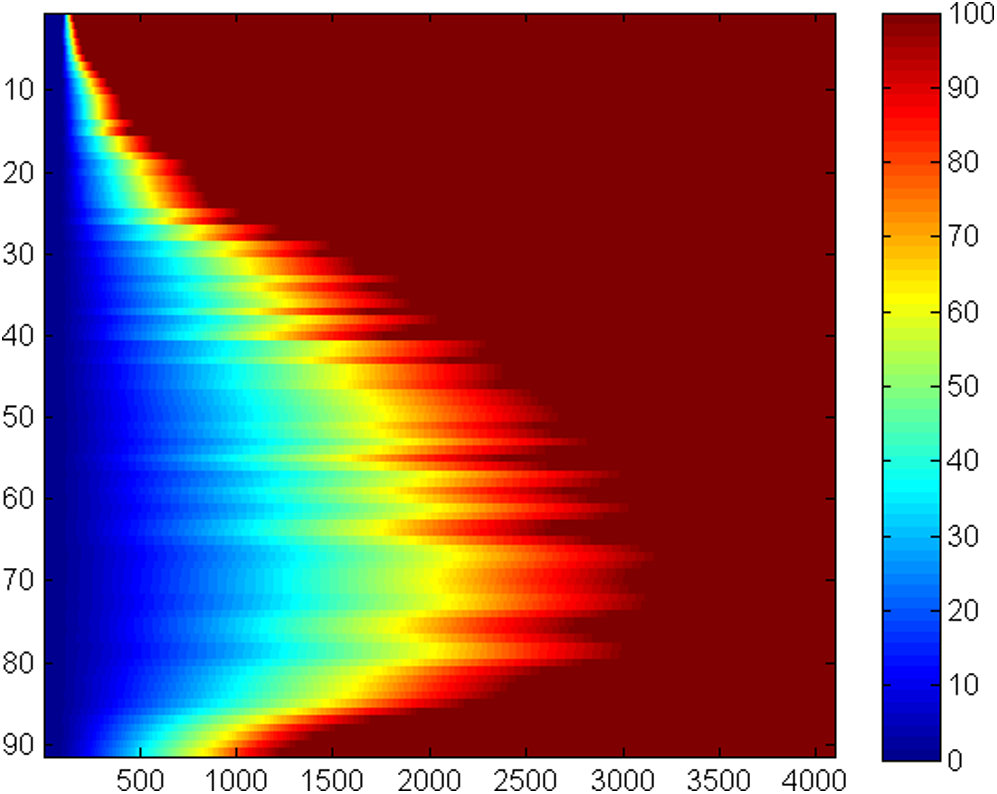
Рис. 15 Справочная таблица коррекции VNIR вдоль спектра (ось X = измеренный уровень серого, ось Y = спектральная полоса, цветовая карта = значение отражательной способности).
Хотя этот подход является теоретически правильным и может улучшить классификационные характеристики, он включает в себя особенно тяжелый этап калибровки. Справочная таблица должна быть рассчитана для фиксированного времени экспозиции и для каждого пространственного пикселя поля зрения. Возможность точной настройки процесса преобразования отражательной способности в соответствии с реальной кривой отклика датчика все еще изучается. Кроме того, отношение сигнал / шум, связанное с длинами волн на краю обоих датчиков (1000 нм) при визуализации частиц с низкой отражательной способностью, падает ниже приемлемого значения; следовательно, эти длины волн в настоящее время удаляются на этапе классификации.
5. Результаты классификации
Набор данных, содержащий 100 фрагментов, ранее отсортированных с помощью портативной рентгеновской флуоресценции (20 фрагментов по классам, с пятью различными классами материалов), был измерен с помощью прототипа. Корректировки, представленные выше, были применены, и некоторые классификации были выполнены с использованием различных инструментов машинного обучения (с использованием библиотеки MATLAB PerClass) .9
5.1 Особенности извлечения
Алгоритмы выбора прямого и обратного признаков были протестированы и сравнены с результатами, полученными при рассмотрении всех признаков с различными классификаторами. Выбор ограниченного числа признаков (до 50) среди наиболее дискриминантных диапазонов не позволил добиться результатов, полученных со всеми доступными функциями. Таким образом, этот вариант был отклонен.
Методы анализа основных компонентов (АОК) и линейного дискриминантного анализа (ЛДА) были оценены с помощью нашего набора данных. Четыре признака АОК показали лучшую дискриминацию, чем 20 первых признаков АОК (как можно видеть на рис. 16). Четыре результата ЛДА сопоставимы с результатами, полученными со всеми доступными функциями, но его производительность лучше.
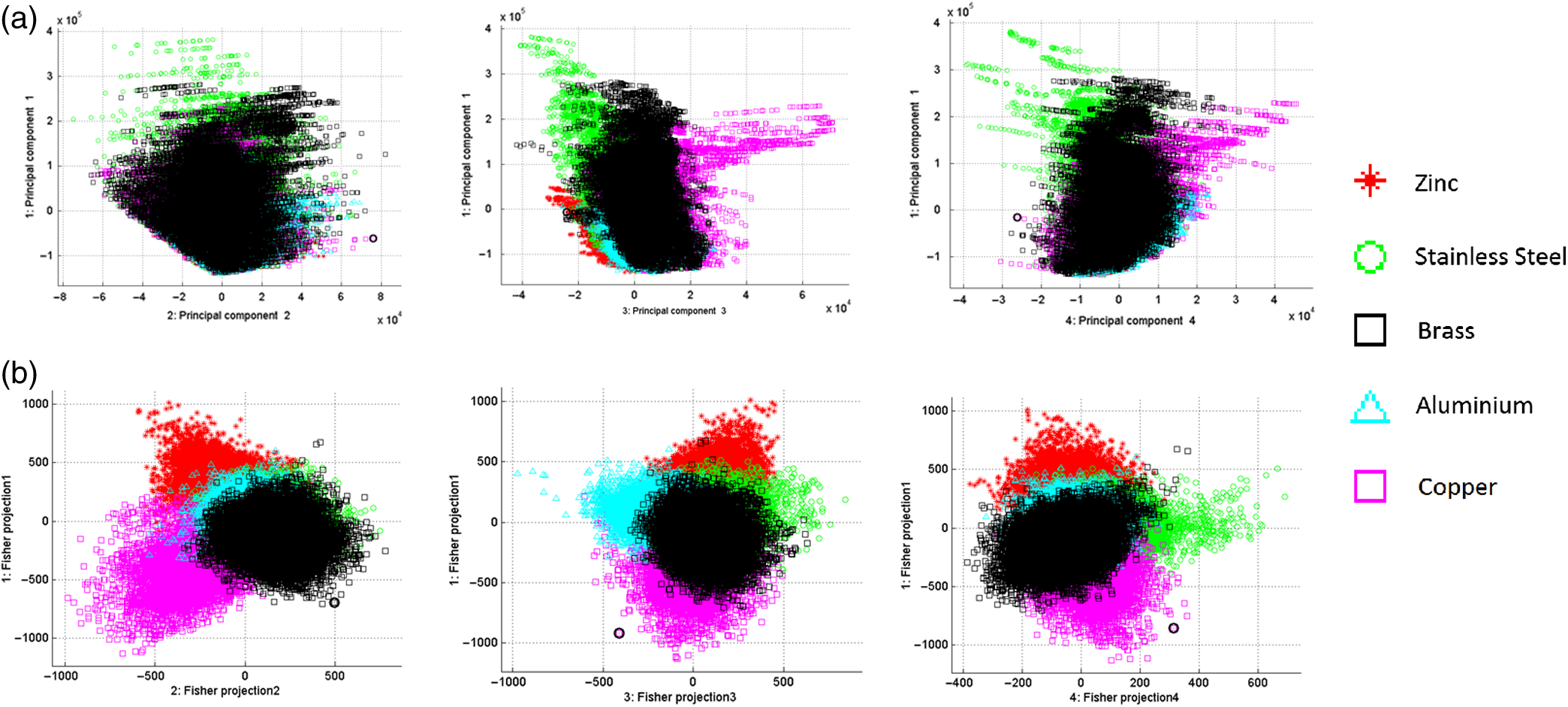
Рис. 16 (а) АОК 1 против АОК 2, АОК 3 и АОК 4. (B) ЛДА 1 против ЛДА 2, ЛДА 3 и ЛДА 4, для всего набора данных. Это показывает, что линейный дискриминантный анализ (ЛДА) в этом случае является более дискриминантным, чем анализ основных компонентов (АОК).
5.2 Классификация
Были проверены следующие методы:
- Квадратичный гауссовский классификатор
- Смесь гауссовского классификатора
- Дискриминантный анализ Фишера
- k-ближайшие соседи
- Дерево поиска решений
- Случайный лес (метод машинного обучения на основе комитета регрессионных деревьев принятия решений).
Обратите внимание, что некоторые из них требуют отбор признаков/ алгоритмы извлечения.
Среди этих классификаторов алгоритм "случайного леса", примененный к функциям, извлеченным из линейного дискриминантного анализа, дал наиболее многообещающие результаты для основных материалов. Эти результаты представлены ниже. Дискриминант Фишера, примененный ко всем спектрам, также дал аналогичные результаты и хорошие вычислительные характеристики. Хотя алгоритм "случайного леса" имеет тенденцию иногда превышать данные обучения. Тот факт, что надежные результаты были получены на 15 новых выборках (набор тестов), обнадеживает.
Случайное подмножество из 20% пикселей, взятых из пяти различных фрагментов для каждого класса, использовалось в качестве обучающего набора (рис. 17, желтый цвет). Все остальные пиксели и фрагменты составляют тестовый набор, который был использован для оценки эффективности классификации. Несмотря на отсутствие отличительных спектральных характеристик для этих материалов, результаты, полученные на этом наборе данных, оказываются удовлетворительными из-за высокой размерности данных (110 полос в VNIR, со спектральным объединением 8 пикселей × 256 полос в SWIR).
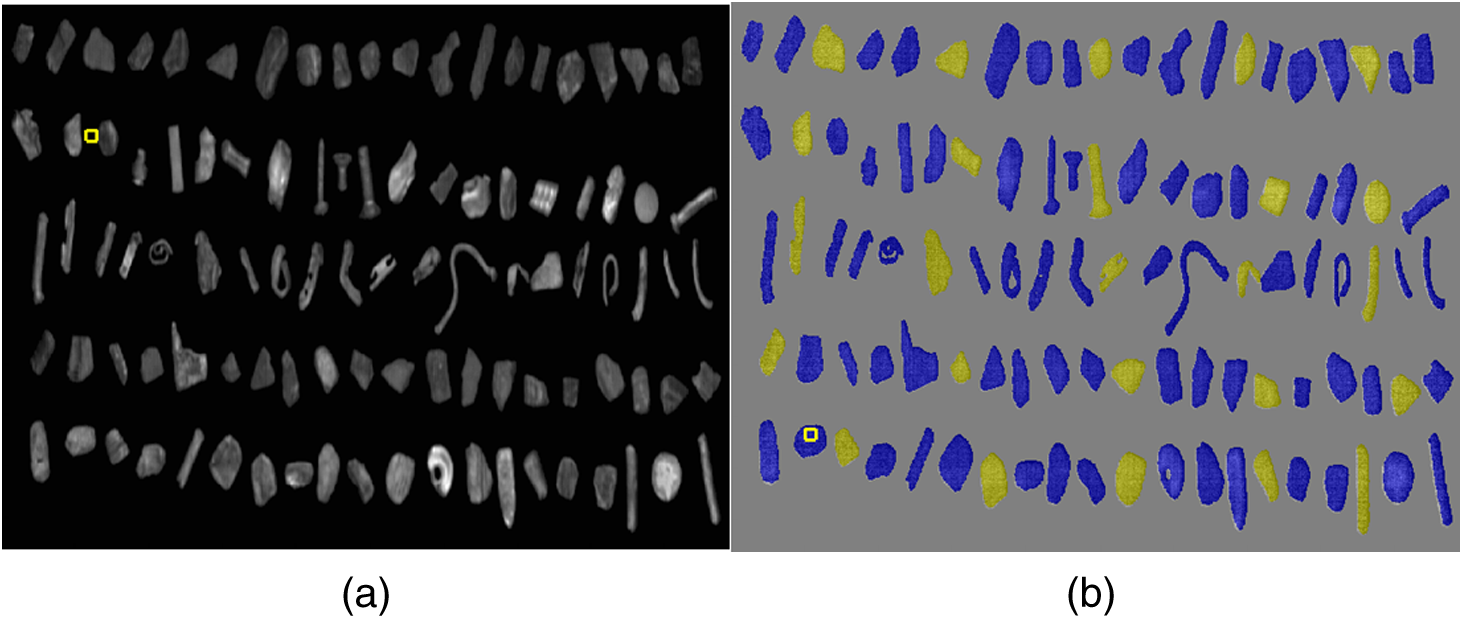
Рис. 17 Набор данных, использованный для первых результатов классификации. Для каждого класса используется 20 образцов, отсортированных по линиям. (а) Изображение уровня серого при 683 нм. (b) желтого цвета - выборки, используемые в качестве обучающего набора (случайное подмножество 20% пикселей); синим цветом указаны образцы используются только для тестового набора.
Результаты представлены на рис. 18 и 19, и продемонстированы на рис. 20. Согласно матрицы ошибок, ошибка классификатора составляет 16,13% на уровне пикселей, но снижается до 4% на уровне объектов (получается путем выбора модального значения гистограммы решений для всей частицы).
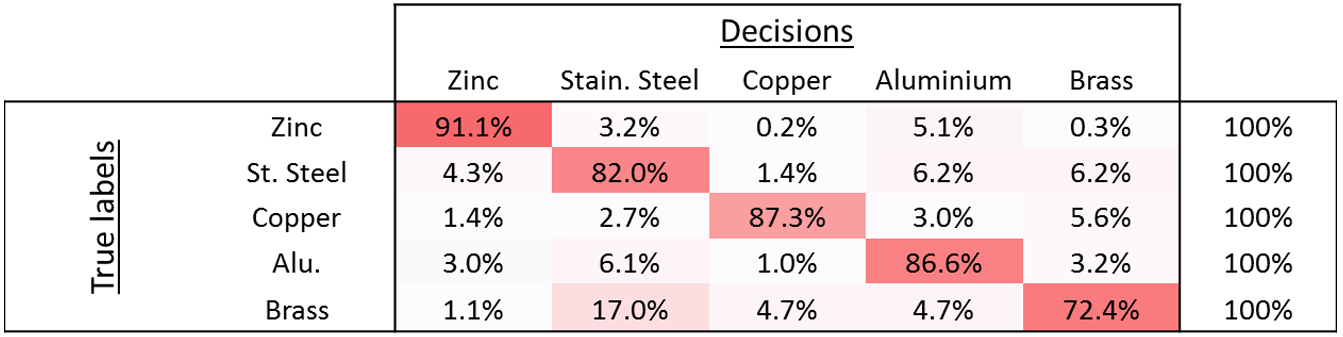
Рис. 18 Матрица ошибочный решений (ЛДА + случайный лес) на уровне пикселей.
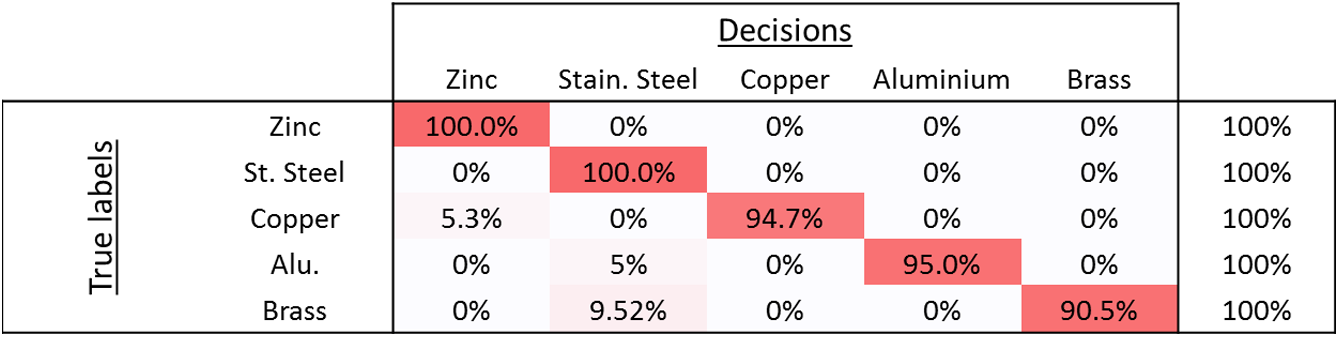
Рис. 19 Матрица ошибочный решений (ЛДА + случайный лес) на уровне объекта.
Перед классификацией объекты сегментируются простым порогом, применяемым к значениям отражательной способности полосы при 750 нм. Порог устанавливается так, что большинство пикселей на конвейерной ленте и пикселей вокруг окружающих частиц, которые представляют сигнал низкого качества, удаляются. Оставшиеся зашумленные пиксели на границе объекта отбрасываются с помощью блоб алгоритма обнаружения. Минимально допустимая область должна быть достигнута, чтобы рассматривать группу пикселей как реальную частицу.
Латунь и нержавеющая сталь являются наиболее сложными классами для разделения, так как процентное соотношение отражательной способности изменяется в малом интервале, а спектры очень похожи.
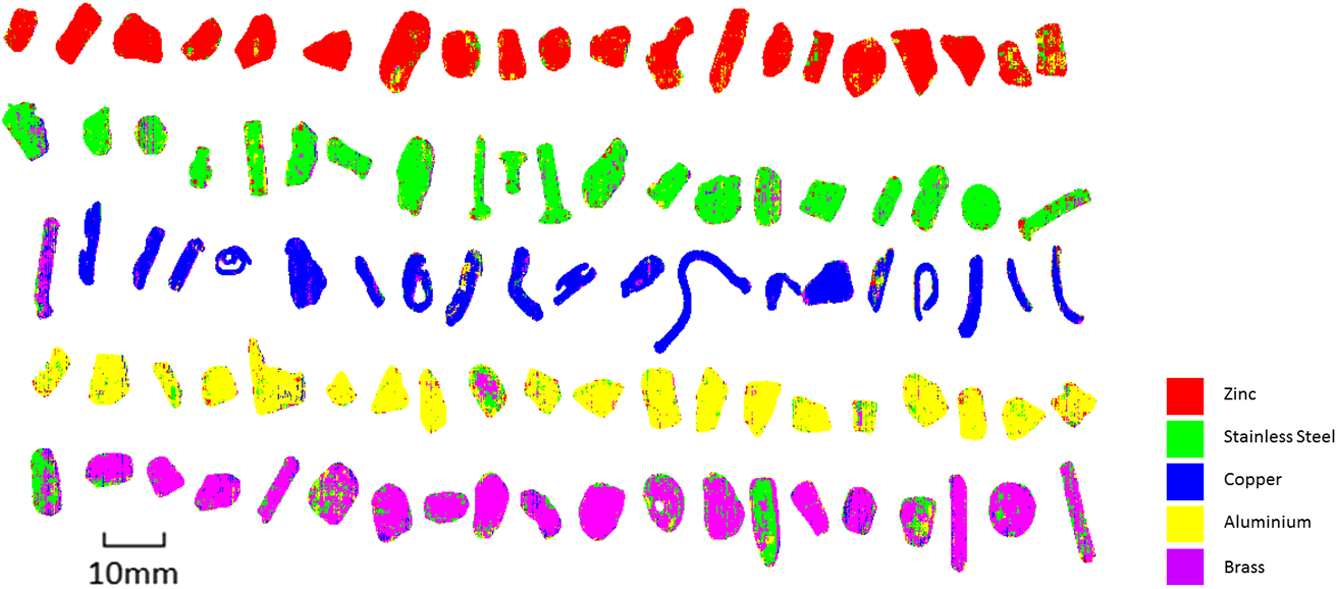
Рис. 20 Результаты классификации, полученные с помощью ЛДА + классификатор случайного леса, на уровне пикселей. Классы располагаются в ряды следующим образом: цинк, нержавеющая сталь, медь, алюминий и латунь. Примечание: первый образец в медном ряду не на своем месте, но правильно классифицирован (он был идентифицирован как латунь с помощью рентгеновского измерения флуоресценции).
6. Заключение
В этой статье представлены элементы, которые необходимо учитывать для правильной калибровки гиперспектральной системы сбора данных для разработки прототипа установки сортировки тонко измельченных металлических сплавов. Прототип основан на одновременном использовании двух камер (VNIR и SWIR диапазон). Интеграция двух камер позволяет измерять спектры отражения металлических фрагментов от 400 до 2500 нм.
Хотя существуют очевидные ограничения в отношении видимой и инфракрасной гиперспектральной визуализации для разделения металлических сплавов, результаты классификации являются многообещающими, и в настоящее время изучается проверка достоверности большого набора данных. До настоящего времени наиболее убедительные результаты были получены с помощью извлечения признаков ЛДА и классификатора "случайный лес".
Поскольку образцы слишком неоднородны, необходимо проводить длительное обучение по образцам, взятым на конкретном потоке материала, чтобы гарантировать надежные результаты. Несколько дополнительных методов, таких как известные алгоритмы обнаружения и каскадные классификаторы, будут рассмотрены с целью повышения эффективности классификаторов.
